1
収穫量の期待値からの低下回避に貢献できます ~植物の生育状態把握に活用可能な画像計測技術の開発~
戸田 清太郎
豊橋技術科学大学、長岡技術科学大学、国立高等専門学校の研究シーズが結集した横断的に検索可能なサイトです。
私たちは、人と一緒に手をつなぎながら並んで歩くロボット〈マコのて〉、人と視線を交わし並んで歩くロボット〈Walking-Bones〉という人との関わり方が異なる2種類のロボットを制作し、人とロボットの間で〈相互主体的な関係〉を築くことを目的に研究しています。

人と機械やロボットの関係は、人が一方的に機械やロボットに命令することがほとんどです。
人とロボットの間で互いに委ねあいながら何かを成し遂げる〈相互主体的な関係〉が構築できます。
【研究成果】
1.〈マコのて〉外観:図1
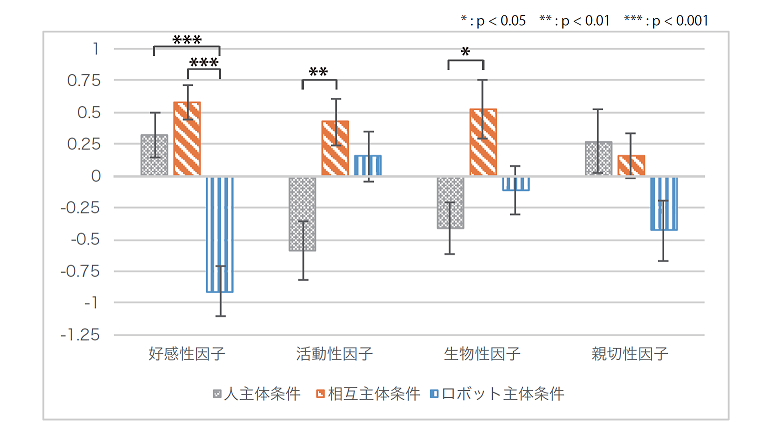
人がリードする条件、ロボットがリードする条件、人とロボットが協調する条件の3つの条件を設定し、人とロボットが手をつないで歩く実験を行いました。協調する条件のロボットは、他の条件よりも好感度が高く、アクティブで生き生きとした印象を与えることが明らかとなりました。(図3)
2.〈Walking-Bones〉外観:図2
周囲のモノや人を見渡しながら、人と一緒に歩こうとするロボット〈Walking-Bones〉を製作し、移動ロボットの行う社会的表示が、子どもから手助け行動を引き出すと予想し、小学校でのフィールドワークを行いました。



公共施設内や店舗内の自律配送ロボットを想定した、周囲の人との関わりを考慮したデザイン
手助け行動を引き出した他の要因の検証と、周囲の人の要因(関わる人の年齢や社会背景など)との関連の検証
長谷川 孔明 (はせがわ こうめい)
豊橋技術科学大学 情報・知能工学系 助教
researchmap
社会に受け入れられるロボットのデザインについて研究しています。この技術にご興味をお持ちの企業の技術相談をお受けします。また共同研究等のご検討の際にはご連絡ください。
掲載日:2022年02月03日
最終更新日:2022年02月03日