1
ヒトと共生できるモビリティを目指して ~ヒトの認知・行動特性に配慮した安心安全な自律型モビリティ~
田村 秀希
豊橋技術科学大学、長岡技術科学大学、国立高等専門学校の研究シーズが結集した横断的に検索可能なサイトです。
スマートシティにおいて、自律型モビリティとヒトがより身近に共生する社会の到来が想定されています。
そのような社会において、ヒトと自律型モビリティがより安心・安全に共生するため、モビリティと関わる際のヒトの認知・行動特性を明らかにした上、自律型モビリティの行動制御アルゴリズムの規範として活用するための研究を行っています。
・ヒトとロボットのインタラクション、衝突回避等に関する他研究は存在するが、そこで明らかにされた知見をもとに自律知能(行動アルゴリズム)自体を改善させる例はほとんどない
・ヒトの認知・行動データからモビリティの自律知能自体を変化させることで「ヒトが最も行動しやすい状態」の実現に貢献
・行動データだけでなく脈拍等の生理指標も取得することでヒトの認知行動メカニズムの詳細把握が可能
近年、ICT技術やデータ活用により、都市の抱える諸課題の解決を目指す新たなまちづくり「スマートシティ化」が政府主導の下で推進されており、特に、ヒト・モノの自由 な移動・配送のために、ヒトと共生する「自律型モビリティ」の活躍が期待されています。
しかし私たち人間は、自律型モビリティが生活圏で多数闊歩する環境下で、人間同士がすれ違う時と同様に自然にふるまうことが出来るのでしょうか。来るスマートシティにおける自律型モビリティの行動制御は、ヒトにとっての"行動しやすさ"を十分に配慮する必要があります。
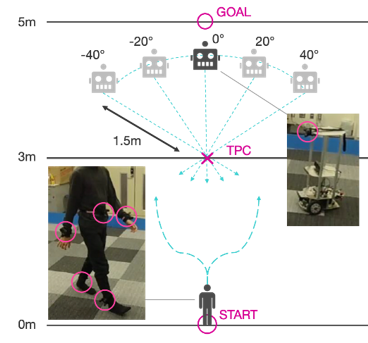
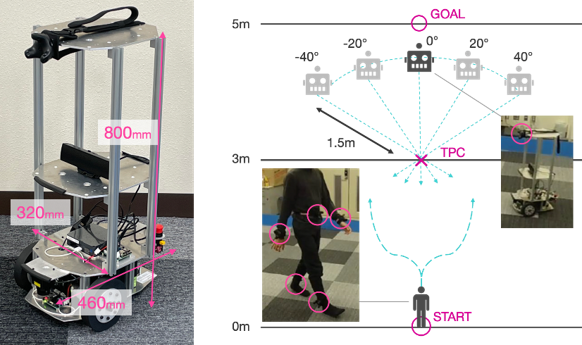
本研究では、ヒトを対象とした心理物理実験を行うための自律型モビリティを独自に開発し、コア技術であるヒトの認知行動・生体信号の計測の知見をもとに、ヒトと自律型モビリティ間のふるまいに付随する行動・環境・生理指標の定量化を目指しています。
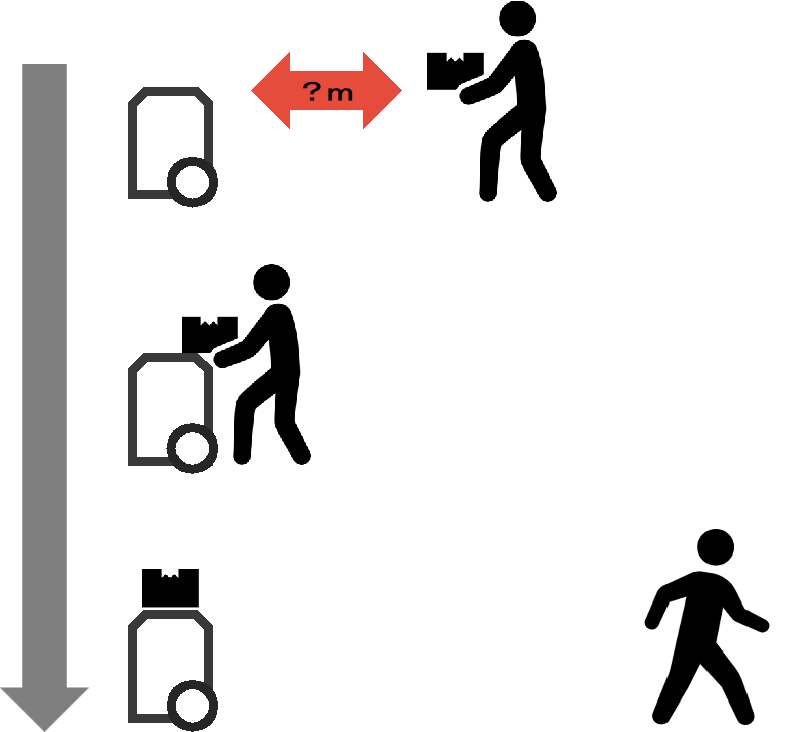
例えば、これまでの研究成果で正面から接近するモビリティに対してヒトがどのように回避するか計測し、歩行時の安全な回避達成のため「ヒトの腰の角度」が重要な推定指標となる点を明らかにしました。また、ヒトの荷物運搬特性に着目し、ヒトがモビリティを介して荷物を受け渡しする際の快適な空間的・時間的位置関係を明らかにする研究も行っています
ヒトと身近に行動する様々な用途のモビリティ(移動型ロボット)の行動制御に適用可能。
・物流用モビリティ(AGV等の自動走行)
・飲食や商業施設等におけるサービスロボット
・介護・福祉サービスロボット
・ラストワンマイルモビリティ等
・実用・製品化に向けての
ハード/ソフトの開発・製造・生産
・モビリティの具体的利用先の明確化
(例:物流,福祉,飲食,PMV...)
・サービス面のエンドユーザ向けのニーズ調査
・より現実に近い実験環境の整備
田村 秀希 (たむら ひでき)
豊橋技術科学大学 情報・知能工学 助教
researchmap
ヒトを研究してきた視点から、新しいコンセプトの
モビリティを提案しようとしています。
ヒト・AI・ロボット等の融合分野に興味がある方は
お気軽ご連絡ください。
掲載日:2023年07月05日
最終更新日:2023年07月05日