1
人間型ロボットの高度な動作制御を実現します ~高度なロボットシステムの構築と動作制御技術~
垣内 洋平
豊橋技術科学大学、長岡技術科学大学、国立高等専門学校の研究シーズが結集した横断的に検索可能なサイトです。
ロボットの動作制御や作業計画を行う計画知能、カメラ・センサ等を用いた認識機能を統合した高度なロボットシステム構築の研究を行っています。例えば、ロボットの外装や関節構造の工夫、高度な軌道計画を少ない計算量で実現する制御システム等をはじめとする研究成果の活用により、企業様のロボットハードウェアで課題解決に合わせた最適なシステム構築が提案できます。
・接触を想定していない部位に環境との接触がある場合、自重で破損しやすく動作可能な環境が限定的。
・はしご昇降等の高度な動作は、軌道計画における計算量が膨大で、実機への実装は不可。
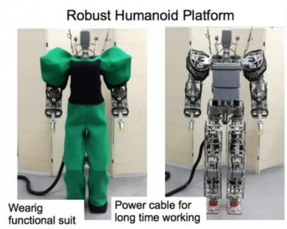
・耐荷重接触点を多く持ち、外部衝撃に強いロバストな外装を実現。
・転んでも壊れにくい転倒動作の生成し、継続動作が可能。
・開発した軌道計画法を適用し、実現例が無かった実機でのはしご昇降動作を実現。
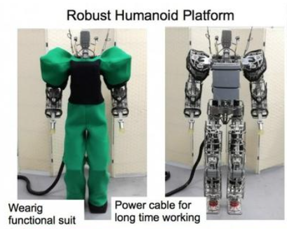

人間の代わりに柔軟な動作・作業を長時間継続実行するロボットシステム
・工場
・発電所
・災害現場等をはじめとする危険地域
ロボットシステムはハードウェアとソフトウェアシステムを上手く統合する必要があります。
ハードウェア開発、システム開発のいずれも、実際の課題に対応して構築する必要があります。
垣内 洋平 (かきうち ようへい)
豊橋技術科学大学 次世代半導体・センサ科学研究所 教授
researchmap
ロボットにより解決ができそうな課題があれば、解決できるシステム提案することができます。
また、ハードウェア技術がある企業の技術を活かしたロボットシステム化ができます。
掲載日:2023年07月05日
最終更新日:2023年07月05日