1
収穫量の期待値からの低下回避に貢献できます ~植物の生育状態把握に活用可能な画像計測技術の開発~
戸田 清太郎
豊橋技術科学大学、長岡技術科学大学、国立高等専門学校の研究シーズが結集した横断的に検索可能なサイトです。
イオン導電性高分子や誘電エラストマーに代表される電場応答性高分子(Electroactive polymer、EAP)や、釣糸人工筋アクチュエータに代表される熱応答性高分子繊維など中心とした、高分子アクチュエータとセンサに関する基礎から応用まで幅広く研究しています。ソフトロボットのための人工筋肉や、静音モータ、人と接する柔らかなアクチュエータデバイス等への応用が期待されます。
電磁モータは高精度、高効率な駆動に適しているが、柔軟性、軽量性には欠けます。
高分子アクチュエータは、柔軟、軽量、非磁性であり、筋肉のような動作が可能です。またディスポーザルなアクチュエータにもできます。
近年、電気や熱で駆動できる高分子材料の開発が進んでいます。それらの材料を使い、ロボットの人工筋肉や運動補助をするパワーアシスト装具、音のしないモータなどへの応用が期待されています。
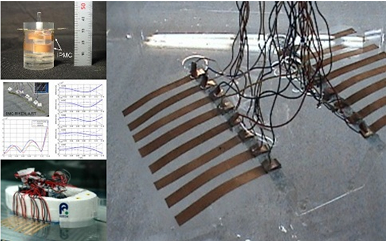
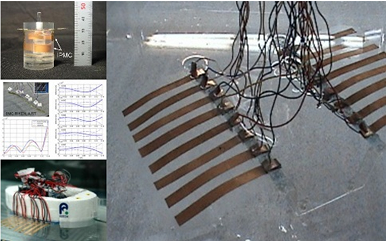
私たちの研究室では、水中で駆動でき低電圧で動作するIPMC (Ionic Polymer-Metal Composite)アクチュエータ・センサ、高電圧で駆動するが高速に応答する誘電エラストマー、釣糸から作ることができる極めて安価で発生力が大きい釣糸人工筋アクチュエータの3種類の材料に主に取り扱っています。
研究室では、材料開発を行う材料科学者とも共同研究を行っています。市販材料や共同研究により提供された材料をもとにして、特性評価、動作原理の物理学、シミュレーション、制御方法の開発、実デバイスの開発までを、一貫して行っています。

・ロボット用人工筋肉
・パワーアシスト装具
・水中ロボット
・超軽量アクチュエータデバイス
・音のしないモータ
(電磁モータと競合しない)アプリケーションの探索
高木 賢太郎 (たかぎ けんたろう)
豊橋技術科学大学 機械工学系 教授
researchmap
複数の高分子アクチュエータに関して、材料開発から、現象論モデルと物理モデル、シミュレーション、実際に動くデバイスの制御まで、一貫して研究する大学研究拠点は現状ではほとんど無く、国内随一の研究室です。ご興味をお持ちの企業の技術相談、共同研究等をお受けします。複数の共同研究実績がありますのでご検討の際にはご連絡ください。
掲載日:2021年08月10日
最終更新日:2021年08月11日