1
収穫量の期待値からの低下回避に貢献できます ~植物の生育状態把握に活用可能な画像計測技術の開発~
戸田 清太郎
豊橋技術科学大学、長岡技術科学大学、国立高等専門学校の研究シーズが結集した横断的に検索可能なサイトです。
複雑な環境下で自律的に行動できる知能システムを研究しています。カメラや距離センサで環境を認識し、状況に応じて臨機応変に行動を計画する高度な情報処理(AI)が知能システム実現の鍵です。

あらかじめ整備された環境や、限定された状況でのみ動作するロボットです。
状況に応じて自律的に行動するロボットが実現可能です。
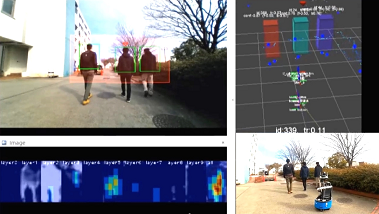
最新研究1:多様な環境を移動できるロボット
カメラやレーザ距離センサを用いて通行可能領域を認識し、安全に移動します。
多様な環境をロバストに認識するための手法を研究しています。(図1)
最新研究2:人物の検出と識別
人物の検出・識別手法を研究しています。
多数の人物を同時に検出したり、特定人物を追跡し続けたりすることができます。(図2)
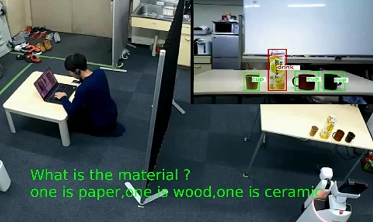
最新研究3:生活支援ロボット
必要に応じて人と会話しながら指示された作業を行うロボットを研究しています。
人からのあいまいな指示を人への質問や環境の認識を通して明確化することができます。(図3)

・付き添いロボット、見守りロボット
・屋外(公園、広場、農場など)移動ロボット
・人と協力して作業をするロボット
想定用途に向けた実証研究
三浦 純 (みうら じゅん)
豊橋技術科学大学 情報・知能工学系 教授
researchmap
これまでに多くの共同研究の実績があります。ロボットは認識、計画,制御にかかわる総合的な技術分野ですが、ロボットシステム全体だけでなく、個別の技術の応用についても対応可能です。ご興味をお持ちの企業の技術相談をお受けします。また共同研究等のご検討の際にはご連絡ください。
掲載日:2021年03月29日
最終更新日:2021年04月02日