1
収穫量の期待値からの低下回避に貢献できます ~植物の生育状態把握に活用可能な画像計測技術の開発~
戸田 清太郎
豊橋技術科学大学、長岡技術科学大学、国立高等専門学校の研究シーズが結集した横断的に検索可能なサイトです。
私たちが世界をどのように知覚し、他者とどのようなコミュニケーションをしているのかを科学的に解明しようとしています。⼈による⼿作業とそれが対象に及ぼす相互作⽤の理解と制御を⽬的とし、フィジカルケアロボットの新たな提唱と要素・統合技術の研究を行っています。
指圧やマッサージの施術方法や効果は施術者の知識と経験で判断している
・ロボットによる施術が可能です。
・人的制限の排除(緊急対応や長時間施術)が可能です。
・効果の数値化による客観的評価が可能です。
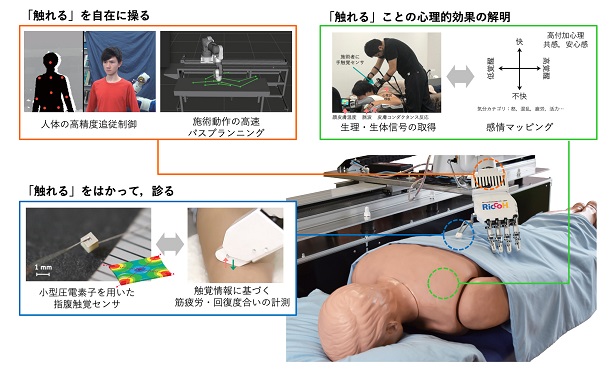
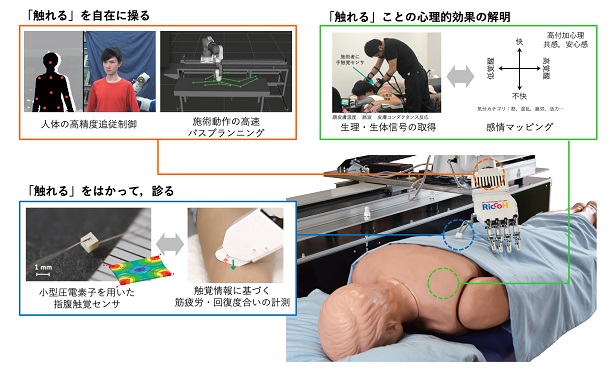
本研究でのフィジカルケアロボットは、指圧・マッサージ運動に特化した知能制御機械によって、⾝体に効果的な施術を⾏う⽅法とシステムを構築することを目指しています。また効果を数値化するために⾝体・感情の評価⽅法を検討しています。
《研究内容》
⇒多指ハンドと多関節アームとの協調動作制御系の確⽴
⇒ロボットが⼈に「触れる」ことの⼼理的効果の解明
⇒ヒト⼼⾝状態の計測のための指腹センシング技術の創成
・フィジカルケアロボット
・身体の知覚、心理状態の評価システム
・人の手に代わる機構の開発
・人に特化したセンサーの開発とセンシング技術の開発
・共同研究者、企業
北崎 充晃 (きたざき みちてる)
豊橋技術科学大学 情報・知能工学系 教授
researchmap
この技術にご興味をお持ちの企業の技術相談をお受けします。また共同研究等のご検討の際にはご連絡ください。
掲載日:2020年06月01日
最終更新日:2020年06月23日