1
収穫量の期待値からの低下回避に貢献できます ~植物の生育状態把握に活用可能な画像計測技術の開発~
戸田 清太郎
豊橋技術科学大学、長岡技術科学大学、国立高等専門学校の研究シーズが結集した横断的に検索可能なサイトです。
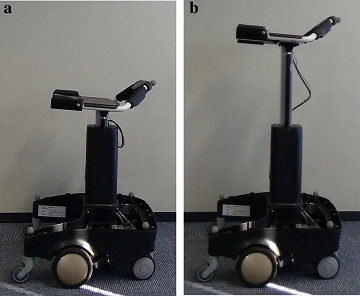
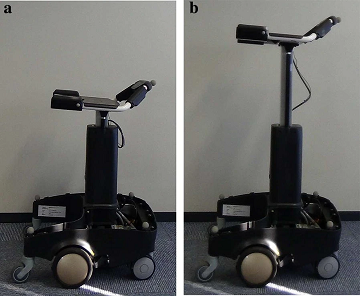
⼈⼯知能(AI)ベースのロボットはさまざまな分野で⼈気を博し、介護ロボットの需要が⾼まっています。このような介護ロボットは、⼈間の状態などを認識または推定し、その結果に応じた⾏動をとります。本研究室では肘置きの上下運動により、⼈間の起立・着座もサポートできる歩行器型ロボットを開発しました。
・環境やユーザを認識して自律的にロボットが動くため、動作の内容やタイミングを人間が理解できず、不安感を覚える。
・ロボットの動作がわからないため、人間がうまく動きを合わせられず、使いにくい。
・ロボットが人間に情報を適切に提示することによりアカウンタビリティを達成し、不安感を与えません。
・ロボットによる認識や推定が不完全であっても、お互いの協調により目的の動作を行うことができます。
【研究成果】
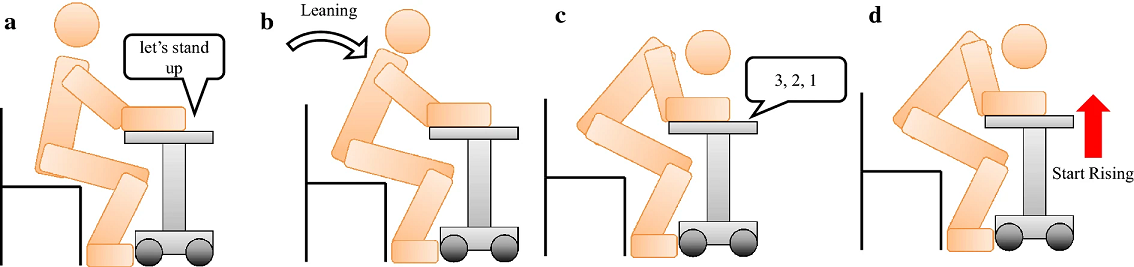
音声ガイダンスを用いた起立⽀援システム
使用者が肘置きに寄りかかった状態で肘置きを上昇させることにより、起立動作を⽀援するロボットシステムを開発しました。⾔葉によるコミュニケーションは介護にとって重要であるため、起立を誘導するガイダンスとロボットの動作のタイミングの提示に、音声を採⽤しています。
提示する情報の内容とタイミングを分析し、推定に基づいて⾏動するロボットがアカウンタビリティを果たし、推定が厳密に正確でなくてもシステムを有⽤にすることができることを明らかにしました。
・介護福祉ロボット
・医療用ロボット
・産業用作業支援ロボット
・パートナーロボット
・見守りシステム
・⾼齢者を対象とした実証
武田 洸晶 (たけだ みづき)
豊橋技術科学大学 機械工学系 助教
researchmap
この技術にご興味をお持ちの企業の技術相談や、共同研究等をご検討の際にはご連絡ください。
掲載日:2021年01月12日
最終更新日:2021年01月12日