
佐藤 海二(さとう かいじ)

| 所属 | 機械工学系 |
|---|---|
| 職名 | 教授 |
| 専門分野 | 精密メカトロニクス/ ロボティクス / 制御工学 / アクチュエータ |
| 学位 | 博士(工学)(東京工業大学) |
| 所属学会 | 精密工学会 / 日本機械学会 / Institute of Electrical and Electronics Engineers (IEEE) / Korean Society for Precision Engineering (KSPE) |
| sato@me ※アドレスの末尾に「.tut.ac.jp」を補完してください |
|
| 研究室web | https://www.rm.me.tut.ac.jp/ |
| 研究者情報(researchmap) | 研究者情報 |
研究紹介
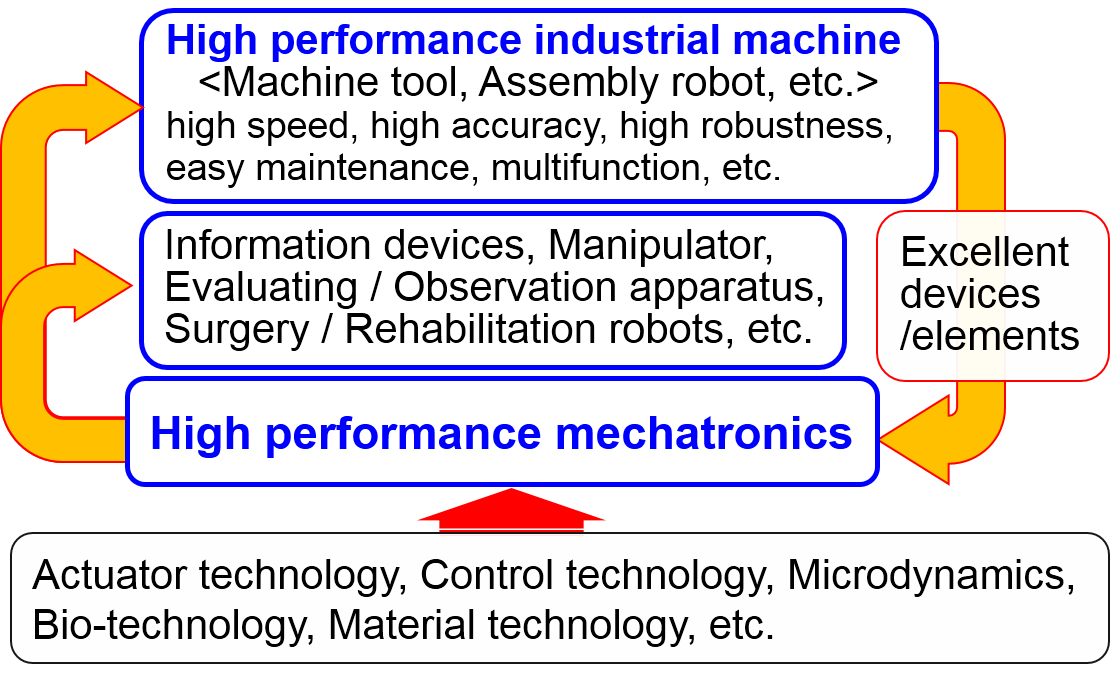
製作容易性,操作性,保守性などの観点からの高い利便性と,高精度・高速といった高い運動性能を両立する,実用的で優れた運動システムを実現し,機械の活用範囲を広げ,快適な社会づくりに貢献することを目指しています.そのために,以下の研究に取り組んでいます.
(a) メカニズムやアクチュエータの特性が支配的な性能を極限的に追求するメカニズム,アクチュエータ
(b) 顕著な非線形性をもつメカニズムやアクチュエータの特性を活用し,簡単に高性能を実現する制御系設計法
(c) 利便性が高い高機能測定システム
{kind=link}
テーマ1:レーザと感温磁性体を用いたワイヤレスアクチュエータを利用したマイクロマニピュレータ
概要
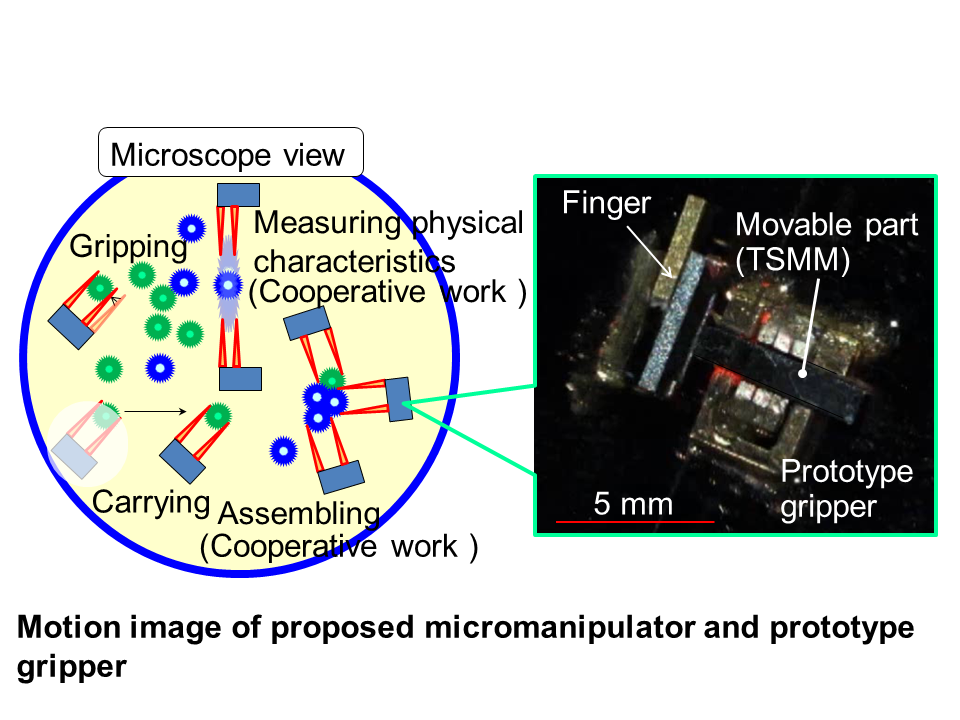
感温磁性体と永久磁石とレーザを組み合わせたアクチュエータは,配線が不要で,簡単な構造をもち,遠隔駆動・エネルギー供給が可能です.これらの特性を生かし,下記の特徴をもつマイクロマニピュレータシステムの実現を目指しています.
(a) 多様な環境に置かれた,細胞やマイクロ人工物などの微小物の操作が可能
(b) グリッパのエンドエフェクタの交換容易
(c) 顕微鏡下で,複数のグリッパを駆動し対象物を操作できるように十分に小型化
(d) 駆動系が作業空間内環境の影響を受けない
(e) 十分な把持力を出力 (> 1mN)
主な業績
1) Kaiji Sato and Tadatoki Shimada : Wireless and Compact Rotary Actuator with Thermo-Sensitive Magnetic Materials for Micro-Manipulator, Proc. of ICPT2016, (Soul, Korea), (2016.11) P-13 ICPT16026_P13.pdf.
2) Tadashi Hama and Kaiji Sato : Positioning Characteristics of the Novel and Compact Actuator Using Temperature Sensitive Magnetic Materials, Proc. of ICPT2016, (Soul, Korea), (2016.11) P-17 ICPT16036_P17.pdf.
キーワード
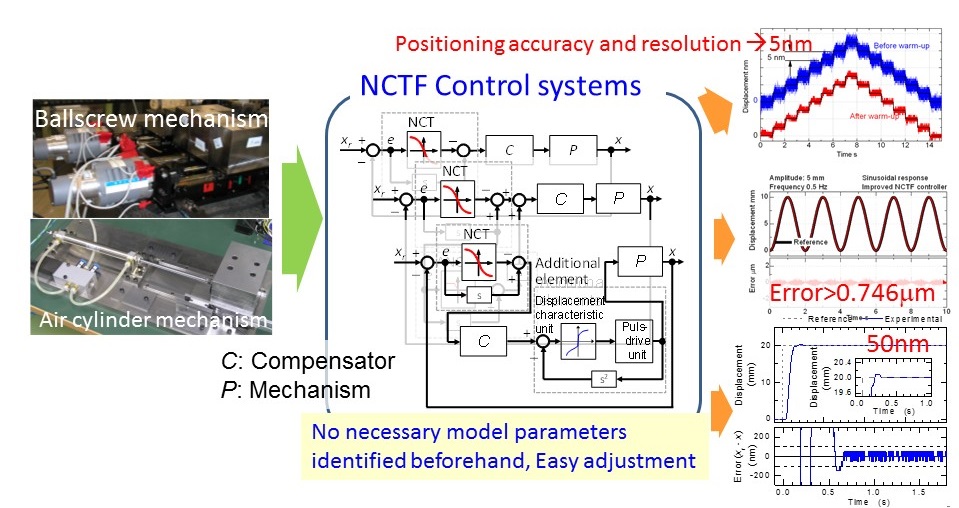
テーマ2:実用的な高性能制御系設計法
概要
 NCTF制御の概要
NCTF制御の概要現在様々なアクチュエータや機械要素を用いた運動機構が利用されていますが,その多くは,摩擦特性や飽和特性,ゲインの入力依存性,ヒステリシス特性,推力リップルなど様々な非線形特性を示し,それら特性が制御系設計を困難にし,性能劣化の要因となっています.そのような問題を克服し,誰にでも簡単に利用できる実用的な高性能制御系設計法の研究を行っています.これまでにボールねじ機構やリニアモータ,空気圧シリンダ,空気圧人工筋応用機構など様々な機構を対象に,高精度制御系設計法を明らかにし,その有効性を実証しています.提案している制御系設計手順は,専門的な知識や事前に用意された機構特性に関する十分な情報が無くても利用できます.例えば位置決め誤差であれば、ボールねじ機構で5nm,エアシリンダで50nm,空気圧人工筋でもサブミクロンオーダを安定して実現しています.
主な業績
1) Wahyudi, Kaiji SATO and Akira SHIMOKOHBE: Characteristics of Practical Control for Point-to-point(PTP) Positioning Systems Effect of Design Parameters and Actuator Saturation on Positioning Performance, Precision Engineering, Vol.27, No.2, (2003) pp.157-169.
2) Kaiji Sato and Guilherme Jorge Maeda: Practical Ultraprecision Positioning of a Ball Screw Mechanism, International Journal of Precision Engineering and Manufacturing, Vol.9, No.2, (2008) pp.44-49.
3) Guilherme Jorge Maeda and Kaiji Sato: Practical Control Method for Ultra-Precision Positioning Using a Ballscrew Mechanism, Precision Engineering, Vol.32, No.4, (2008) pp.309-318.
4) Kaiji Sato and Yusuke Sano : Practical and Intuitive Controller Design Method for Precision Positioning of a Pneumatic Cylinder Actuator Stage, Precision Engineering, Vol.38, No.4, (2014) pp.703-710.
5) Shin-Horng Chong, Kaiji Sato: Practical and robust control for precision motion: AR-CM NCTF control of a linear motion mechanism with friction characteristics, IET Control Theory & Applications, Vol.9, No.5, (2015) pp.745-754.
6) Shaofei Wang and Kaiji Sato: High-precision motion control of a stage with pneumatic artificial muscles, Precision Engineering, Vol.43, (2016) pp.448-461.
キーワード
テーマ3:長期安定運用に適した精密ロボット
概要
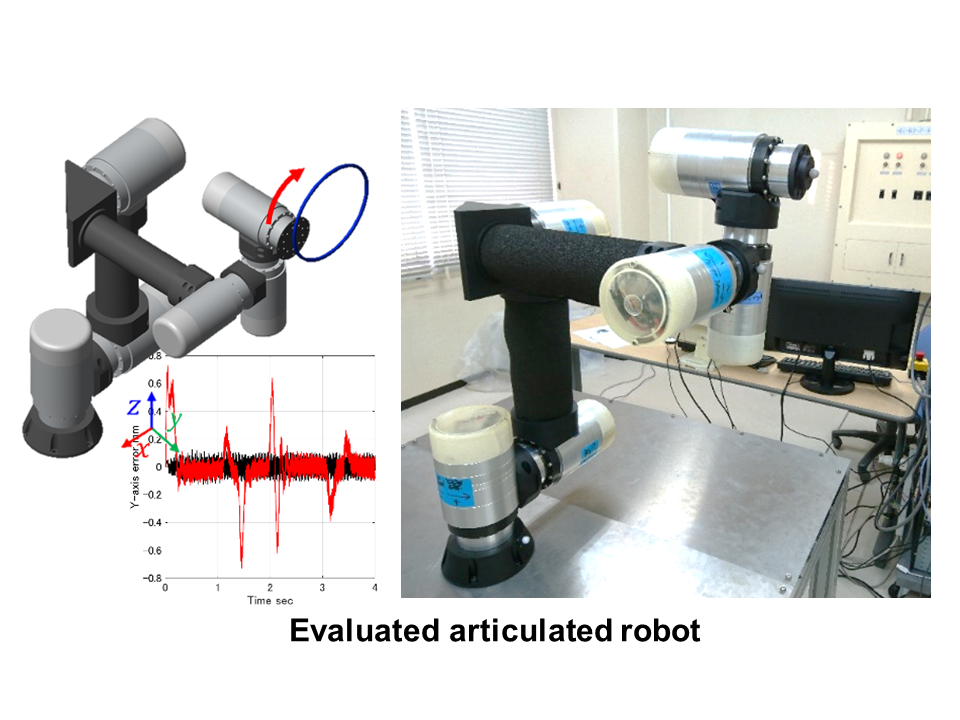
労働力人口減少下で豊かな社会を持続させるためには,自らを管理,改善するロボットを提供し,長期安定利用することが求められます.また精緻で正確な作業を可能とするために,高精度運動能力が必要です.そのような精密ロボットを実現するために,次の課題に取り組んでいます.
(a) 機構の精度劣化要因の解明と実用的な高精度制御系設計法
(b) 機構状態を把握するための組み込み容易なセンシングシステム
(c) 運動機構の性能の長期安定補償法
キーワード
担当授業科目名(科目コード)
精密メカトロニクス(M21623190),メカトロニクス(B11630140),制御工学(B11620040),知能ロボティクス工学(D31030050),機械工学入門(B11510090)
その他(受賞、学会役員等)
受賞歴
1996年 日本機械学会賞研究奨励賞
2001年 日本機械学会2000年情報・知能・精密機器部門優秀講演論文賞
2003年 平成15年度東工大挑戦的研究賞
2007年 日本機械学会生産加工・工作機械部門研究業績賞
2016年 公益財団法人工作機械技術振興財団工作機械技術振興賞(論文賞)
2018年 公益社団法人精密工学会 精密工学会論文賞
学会活動
2013年~現在 精密工学会 超精密位置決め専門委員会委員長
その他の研究実績
1) 超高加速・高速リニアモータとその高精度制御
2) 使い捨て可能なフィルム状可動子をもつリニアモータとその高精度制御
3) 液体の表面張力を利用したマイクロ部品のセルフアライメント
4) 感温磁性体を用いた小型高推力アクチュエータ
5) マイクロメカニカル光スイッチ
6) 製作容易な静電フィルムアクチュエータとその高精度制御
など