特集
もくじ
- これからの豊橋技科大の産学連携と社会的役割
副学長(研究担当) 技術科学イノベーション研究機構長/機械工学系教授
寺嶋 一彦(てらしま かずひこ) - 産学連携ロボット技術による地域農業の支援
情報・知能工学系教授
三浦 純(みうら じゅん) - 波動の力で走るロボットついに登場
未来ビークルシティリサーチセンター長/電気・電子情報工学系教授
大平 孝(おおひら たかし)
Chapter1これからの豊橋技科大の産学連携と社会的役割
副学長(研究担当)
技術科学イノベーション研究機構長/機械工学系教授
寺嶋 一彦(てらしま かずひこ)
豊橋技術科学大学は、"技術"というものを科学的に学問、研究し、新しい"要素技術"、"もの"、"システム"を創造していく大学というのが一つのキャッチフレーズです。本学の8割の学生は、モノづくりを目指した高等専門学校からの学生です。そのほか、普通高校、工業高校からの学生や各国からの留学生等、本学は多様な学生からなります。このように、モノづくりが得意な学生に、更に高度な技術科学を勉強させ、創造的な技術を生みだし、それを社会実装まで持っていくことが本学の大きな使命と思います。その実現には、大学単独では限界があり、産学連携・異分野融合が不可欠になります。そこで、本学では、技術科学イノベーション研究機構を構築し、イノベーション協働研究プロジェクトを軸に産学連携共同研究を組織的に進めています。
この研究機構を本学の研究組織の中心に置き、従来の教員のボトムアップな研究に加え、大学がトップダウンで戦略的に研究を推進していく新しいチャレンジを開始しました。戦略研究部門の研究テーマの選定においては、学内公募を行い、厳選の上、平成28年度は16件のイノベーション協働研究プロジェクトを立ち上げました。新しいこのプロジェクトは、国内外の研究機関や企業とのマッチングファンドにより、特定分野の最先端を切り開くと共に、研究成果の社会実装・社会提言を強化します。プロジェクトの実施期間は原則3年で、各プロジェクトは自己資金として外部資金(共同研究費等)を用意し、大学側からもプロジェクト運営資金を配分するマッチングファンド形式です。16件はいずれも、グローバル企業や地元の企業などとの大型産学連携プロジェクトです。平成29年度には4件の新規プロジェクトを加え、継続と合わせ20件のプロジェクトを採択しました。
協働研究プロジェクトのテーマは、センシング、ロボット、環境、脳、生命、ビークル、防災、農業、産業技術などと多岐にわたっています。技術科学イノベーション研究機構の立ち上げを契機に、本学に多様な分野の研究が根付くと共に、特定分野の研究拠点が生まれることを期待しています。さらに、発明、新製品、ベンチャー企業、大プロジェクトなどが生まれ、豊橋技術科学大学発の社会実装が幾つも創出することを夢見ています。技術・科学開発とともに、社会実装までやり遂げていく大学であってこそ、全国700大学の中で、"きらりと光り輝く"存在となり、その実現が、豊橋技術科学大学のこれからの社会的役割であると考えています。
Chapter2産学連携ロボット技術による地域農業の支援
情報・知能工学系教授
三浦 純(みうら じゅん)
愛知県および東三河地域は農業の盛んな地域として有名で、特に施設園芸作物が多く生産されています。近年、高齢化に伴う農業労働人口の減少や自由貿易の流れに伴う国際的な競争の高まりなど、この地域だけでなく日本の農業全体としても大きな課題があり、喫緊の対応が求められています。本学では、愛知県の「知の拠点あいち重点研究プロジェクト」事業の一つとして、「施設園芸作物の収穫作業支援ロボットの研究開発」プロジェクトを推進中であり、本学から研究リーダー、シンフォニアテクノロジー㈱から事業化リーダーを立て、近い将来の事業化を念頭においた研究開発を行っています。
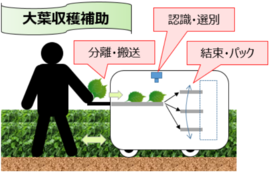
ロボット技術による農業支援についての取り組みは国内外で行われていますが、今回のプロジェクトでは、東三河地域によく見られる施設園芸(温室栽培)を対象とし、二種類のロボットの開発を進めています。一つは大葉の収穫支援ロボットで、柔軟物のハンドリング技術、画像認識技術などを利用して、摘み取り直後の選別やパッキングなどの工程を自動化することを目指しています(イメージ図を図1に示します)。
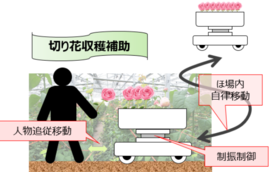
もう一つはバラや菊などの切り花の収穫支援ロボットで、切った花をすぐ水につけられるように水槽運搬ロボットが人について動き、また収穫終了後は自動的に集荷場所に移動するという機能の実現を目指しています(同図2)。現在、プロジェクト開始から1年半ほど経ち、試作機による検証と改良を着実に進めています。
産学連携では大学の研究力と企業の技術力の統合・融合が重要になります。大学の研究成果(=論文)では新規性がもっとも重要な要素ですが、応用技術開発では、信頼性やコスト等の面から様々な手法を検討することが重要になってきます。今回のプロジェクトにおいても、実際の収穫作業の現場を見学させて頂き、現状の技術レベルと研究開発期間を考慮しながら自動化する工程を検討しました。産学連携は、大学の研究者にとって自身の研究成果を世に問う貴重な機会を与えてくれます。今後も地域の産業に貢献できる研究開発を進めていきたいと考えています。
Chapter3波動の力で走るロボットついに登場
未来ビークルシティリサーチセンター長/電気・電子情報工学系教授
大平 孝(おおひら たかし)
みなさんは「波動」と聞いて何を思い浮かべるでしょうか。海の波のような動きをするものは全て広い意味で波動と言えます。例えば身近にあるものでは、音・光・電波などです。波動をうまく活用すれば離れた場所へ情報やエネルギーを届けることができます。このための手法を「ワイヤレス技術」と呼んでいます。
ワイヤレス技術は古くから実用化されています。歴史的に見ると、ワイヤレス技術の第1の大きな社会実装は1920年代から始まったラジオ・テレビ放送です。第2の大きな社会実装は2000年頃から爆発的に普及した携帯電話・PHS・WiFi・スマートホンなどのモバイル通信です。そして、第3の大きな社会実装がまさにこれから始まろうとしています。放送、通信に続く第3の矢。それが「ワイヤレス電力伝送」です。放送や通信が情報を伝える役割を果たすのに対して、ワイヤレス電力伝送はエネルギーを伝えるのが狙いです。
少なくとも20世紀までは、ワイヤレスで電力を伝えるなんてとても現実的でない、というのが電気通信技術者の常識でした。それがこの10年の研究で技術が飛躍的に進展したのです。実用化を可能にしたポイントは基本理論の発見です。それは本学発の共鳴Q理論です。この理論はワイヤレス技術の発展に寄与した功績で平成29年度の文部科学大臣表彰に選ばれました。理論の技術科学的説明は文献[1][2]をご覧下さい。この理論を用いて開発に成功したのが標題にある「波動の力で走るロボット」です。
通常、ロボットが動くためのエネルギー源は内蔵のバッテリーです。ということは、ときどき充電のために休ませる必要があります。人間に喩えると食事休憩にあたります。デンソーの工場で働くロボットも同じ状況でした。つまりバッテリーの電気残量が減ってくると、一時的に停止させて充電するか、あるいは新しいバッテリーに取り替える必要がありました。このような手間や停止時間は24時間働く忙しい工場にとって深刻な課題となっていました。そこで本学とデンソーは共同で研究を重ね、ついにワイヤレス給電で走る小型高速搬送ロボットの開発に成功したのです。この新型ロボットは「走行中」に充電できるので工場の稼働率向上に大きく貢献します。ワイヤレス充電はパソコンのマウスの充電や携帯の置くだけ充電などのようなほぼ静止している機器では既に市販されていますが、高速走行中のロボットへのワイヤレス給電はこれが世界初の社会実装となります。

文献
[1] 大平 孝, "ワイヤレス電力伝送の10年," CQ出版 RFワールド, no.40, pp.42-51, Oct. 2017.
[2] 大平 孝, "ワイヤレス給電の実現を支えるTUT発の共鳴Q理論," e-Newsletter TUT Research, No.11, Dec. 2017.
発行お知らせメール
天伯の発行をメールにてお知らせします。
