1
ナノの光で原子レベルの平滑化が実現します ~近接場光エッチングの産業応用~
八井 崇
豊橋技術科学大学、長岡技術科学大学、国立高等専門学校の研究シーズが結集した横断的に検索可能なサイトです。
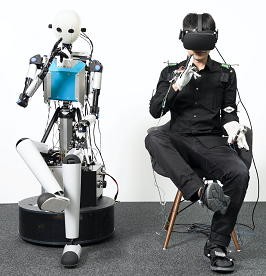
ロボットハンドによる精緻な手指運動を実現させるマスタースレーブ計算手法を開発しました。操縦者側の手指姿勢の推定に、9軸慣性センサとモーションキャプチャを併用した順運動学モデリングを行い、そのモデルで推定した操縦者の指先位置に基づいてロボットハンドのジョイント角を逆運動学で求めることで、マスタースレーブ間での指先位置を正確に一致させることに成功しました。この手法により、テレイグジスタンスロボットの操縦者は自らの手指運動をロボットハンドを使って正確に再現させられます。
ロボットハンド制御
・作業者とロボットの体格差による指先等の体の位置や構成の整合性の確保が困難。
・ロボットハンドで再現する指の動きの正確性は限定的な範囲のみ。
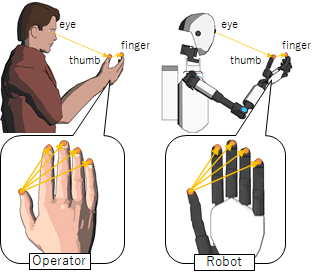
・2つのベクトルの一致に基づいたロボットハンド制御法によりロボットハンド上に操作者の手の形を再現することができます。
・ものをつまむ動作をロボットハンドで実現し、直感的な操作を支援することができます。
【研究成果】
ロボットとオペレーターの体格差をどのように管理し、その対応関係を維持するかという課題を、手の親指と対向する指の空間的な関係が精密な手操作を行う上で重要であることを見出しました。
(1) 親指の先端と対向する指との距離このベクトルを保持することでロボットハンド上に操作者の手の形を再現することができました。
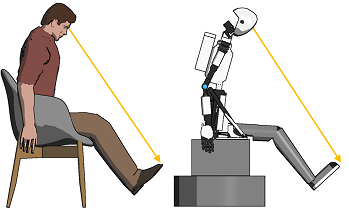
さらに脚部についてもアーム制御と同様に、オペレーターの足首の位置、姿勢を視点からのベクトルをマスタースレーブ間で一致させる制御を実現しました。
上記制御技術を「JST-ACCEL身体性メディアプロジェクト」において開発された67 自由度テレイグジスタンスロボット "TELESAR VI" のマスタースレーブシステムに実装しました。
・遠隔コミュニケーション、旅行やショッピングなどの遠隔体験
・極限環境下における作業、遠隔医療
・身体動作を伴う遠隔就労への適用
・順運動学モデリングにおけるリンク長推定プロセスの簡便化
・逆運動学計算における指先姿勢の利用
井上 康之 (いのうえ やすゆき)
豊橋技術科学大学 情報・知能工学系 特任助教
researchmap
この技術にご興味をお持ちの企業の技術相談をお受けします。また共同研究等のご検討の際にはご連絡ください。
掲載日:2020年12月01日
最終更新日:2020年12月01日