1
ナノの光で原子レベルの平滑化が実現します ~近接場光エッチングの産業応用~
八井 崇
豊橋技術科学大学、長岡技術科学大学、国立高等専門学校の研究シーズが結集した横断的に検索可能なサイトです。
建造物外壁調査は10年に1度行うことが義務化されましたが、現状コストのかかる足場建設や危険を伴うブランコ作業が必須であり、人手不足や多大な検査費用のため調査が進んでいないのが実情です。それらを安全かつ手軽で安価に行うためのプラットホームとしてのロボットの開発を目指しています。
足場建設から検査実施、診断と報告書作成まで全て人手のため、費用、期間が多大な負担を伴います。
短期間で安価に検査・診断でき高所作業等の危険も除去できます。報告書作成も省人化可能です。他用途(清掃・塗装・補修)展開可能です。
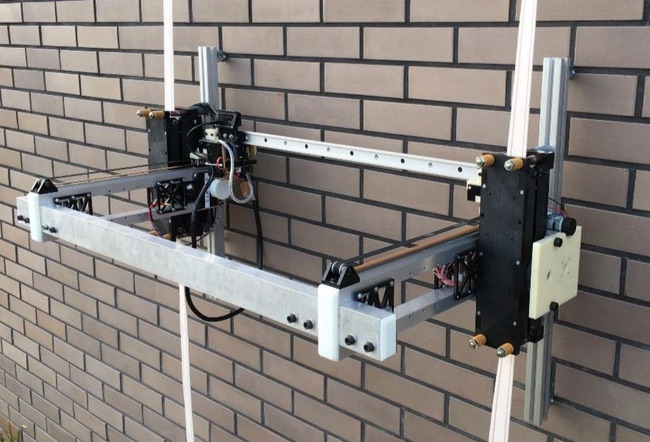
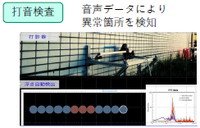
2008年建築基準法改正により,竣工後10年経過した建築物外壁の全面調査報告が義務付けされましたが、これを「安全」「手軽」「安価」に行うためのプラットホームロボットの開発を行いました。自動操縦・遠隔操縦、調査画像の記録・打音異常検知機能を有し調査報告書の自動作成まで可能になります。
【プラットホームロボットの特徴】


壁面を自動または遠隔操縦で走行するロボット
用途:外壁外観検査、打音検査、塗装、清掃、壁面補修などの高所、危険作業等の置換え
・音声による欠陥認識率の向上
・1列調査後のロボットの横移動方法(自動化)
・実用化に向けた安全対策
・他用途への展開
佐野 滋則 (さの しげのり)
豊橋技術科学大学 機械工学系 准教授
researchmap
ニーズに合った特定の作業を行うロボットの設計立案から制御まで対応します。本技術の実用化に向けて研究をさらに進めており、企業との共同研究を希望します。
掲載日:2021年03月10日
最終更新日:2021年03月10日