
佐野 滋則(さの しげのり)

| 所属 | 機械工学系 |
|---|---|
| 兼務 | 情報メディア基盤センター |
| 職名 | 准教授 |
| 専門分野 | 制御工学 / システム同定 |
| 学位 | 工学博士(名古屋大学) |
| 所属学会 | 計測自動制御学会 / 日本機械学会 / 日本ロボット学会 |
| sano@me ※アドレスの末尾に「.tut.ac.jp」を補完してください |
|
| 研究室web | http://www.rm.me.tut.ac.jp |
| 研究者情報(researchmap) | 研究者情報 |
研究紹介
近年,高性能で安価なコンピュータやその周辺機器の出現により,より高度な制御系を構築・実現できるようになってきました.それに伴い,そのような高度な制御系に対して有用な制御対象のモデルを作成する重要性も高まっています.こうした背景から,以下のことを研究しています.
- 移動ロボットの経路計画・制御
- 高分子アクチュエータのモデル化と制御
- システム同定のための実験計画
- 学習による行動獲得と制御
テーマ1:移動ロボットの経路計画・制御
概要
 移動ロボット
移動ロボット近年,様々なところで移動ロボットの需要が高まりつつあり,活発に研究されています.本研究では,人間操作型移動ロボットや自律移動ロボットを対象として,最適な経路の生成や障害物回避のための経路の修正,操作支援等の研究をしています.
キーワード
移動ロボット,経路計画,障害物回避,操作支援
テーマ2:高分子アクチュエータのモデル化と制御
概要
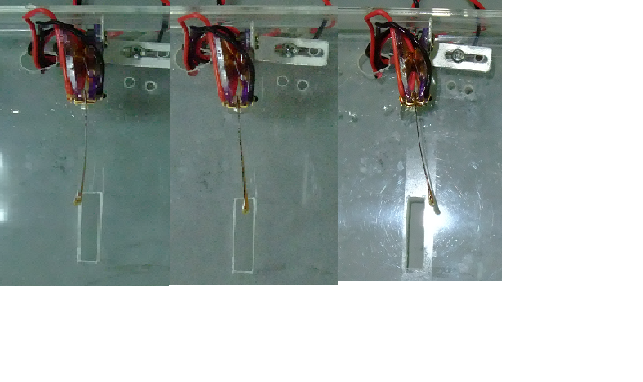 高分子アクチュエータ
高分子アクチュエータ近年,新しいアクチュエータに関する研究が活発になされています.高分子アクチュエータもその一つです.本研究では高分子アクチュエータの一つであるIPMC(Ionic polymer metal composite)に対して,セルフセンシングアクチュエータや複数のIPMCアクチュエータを使用した協調制御の実現を目指しています.
キーワード
高分子アクチュエータ,セルフセンシングアクチュエータ
テーマ3:システム同定のための実験計画
概要
制御系設計を行うにあたり,よいモデルを得ることは重要である.そのためには,同定対象に適したモデル構造や同定手法を選択することが重要であるのと同様に,外乱や無視したモデル化誤差の影響を受けにくく,データの独立性も十分あるような観測データを取得することも重要である.そこで,本研究では同定対象について得られる事前情報から,どのような信号がモデルを同定するのに適しているかを求めることを目的としています.
キーワード
システム同定, 同定実験計画, 最小二乗法, 非構造的不確かさ, 線形行列不等式(LMI)
担当授業科目名(科目コード)
物理学Ib / ロボット工学
機械工学基礎実験 / 機械創造実験
ロボットの機構と運動
知能ロボティクス工学