
Sano, Shigenori

| Affiliation | Department of Mechanical Engineering |
|---|---|
| Concurrent post | Information and Media Center |
| Title | Associate Professor |
| Fields of Research | Control Engeering / System Identification |
| Degree | Doctor in Engineering(Nagoya University) |
| Academic Societies | Department of Mechanical Engineering |
| sano@me Please append ".tut.ac.jp" to the end of the address above. |
|
| Laboratory website URL | http://www.rm.me.tut.ac.jp |
| Researcher information URL(researchmap) | Researcher information |
Research
In recent years, advanced control strategies can be realized due to computers and peripherals with high performance and low cost. Therefore, it is more important to make a good model for the advanced control system design by the identification.
Under the back ground, my research interests are now in:
- Trajectory planning and control for mobile robot
- Modeling and control of a polymer actuator
- Experimental design for system identification
- Behavior acquisition by learning and control
Theme1:Trajectory planning and control for mobile robot
Overview
 Mobile Robot
Mobile RobotRecently, necessity of mobile robot is increasing at various situation, so mobile robots are studied actively. we study the control system for mobile robots(human operated type and autonomous type) such as the generatatio of the optimal trajectory, the correction of trajectory for obstacle avoidance and the operational support.
Keywords
Theme2:Modeling and control of a polymer actuator
Overview
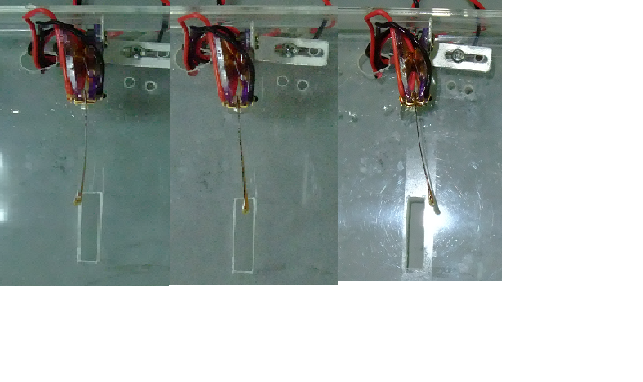 polymer actuator
polymer actuatorIt's studied actively about an actuator newly in recent years. A polyer actuator is also the one. I'm aiming at realization of self-sensing actuator and the cooperation control using IPMC (Ionic polymer metal composite) actuator in this research.
Keywords
Theme3:Experimental design for system identification
Overview
When a control system is designed, it's important to get a good model. As it is important to choose the model structure and the distinction technique suitable for a distinction target for it, it is also important to acquire the data to independ enoughly and to have little affect on disturbance and an unmodeled dynamics. In this research, we aim at obtaining the such data based on the priori information.
Keywords
Title of class
Physics 1b / Robotics
Machine Fundamental Experiments of Engineering / Creative Experiment for Mechanical Engineering
Mechanism and Motion of Robots
Engineering of Intelligent Robotics