
高木 賢太郎(たかぎ けんたろう)

| 所属 | 機械工学系 |
|---|---|
| 職名 | 教授 |
| 専門分野 | アクチュエータ,制御工学 |
| 学位 | 博士(工学)(名古屋大学) |
| 所属学会 | 日本機械学会,計測自動制御学会,システム制御情報学会,日本ロボット学会,IEEE |
| takagi@me ※アドレスの末尾に「.tut.ac.jp」を補完してください |
|
| 研究室web | https://smr.me.tut.ac.jp/ |
| 研究者情報(researchmap) | 研究者情報 |
研究紹介
圧電材料(Piezoelectric materials)や電場応答性高分子(Electroactive polymer, Electromechanically-active polymer, EAP),熱応答性高分子繊維などのスマート材料(Smart materials)を中心としたアクチュエータとセンサに関する基礎と応用について研究しています. 基礎としては,スマート材料の数理モデルの構築,物理パラメータ推定,制御法を研究します. 応用としては,ロボティクス応用や,産業機械への応用を目指したメカトロニクス応用を行っています.
研究室では,おもに次のテーマについて研究しています.
- 高分子アクチュエータ・センサの数理モデリングと制御
- 高分子アクチュエータ・センサのロボティクス・メカトロニクス応用
- 圧電材料・電磁アクチュエータを用いたセンサレス振動制御
高分子アクチュエータとは何かについては解説記事をご覧ください. [ロボット学会誌2019] [計測と制御2020]
技術相談・共同研究のお問い合わせは次のHP [技術相談問い合わせ] からご連絡ください.
テーマ1:高分子アクチュエータ・センサの数理モデリングと制御
概要
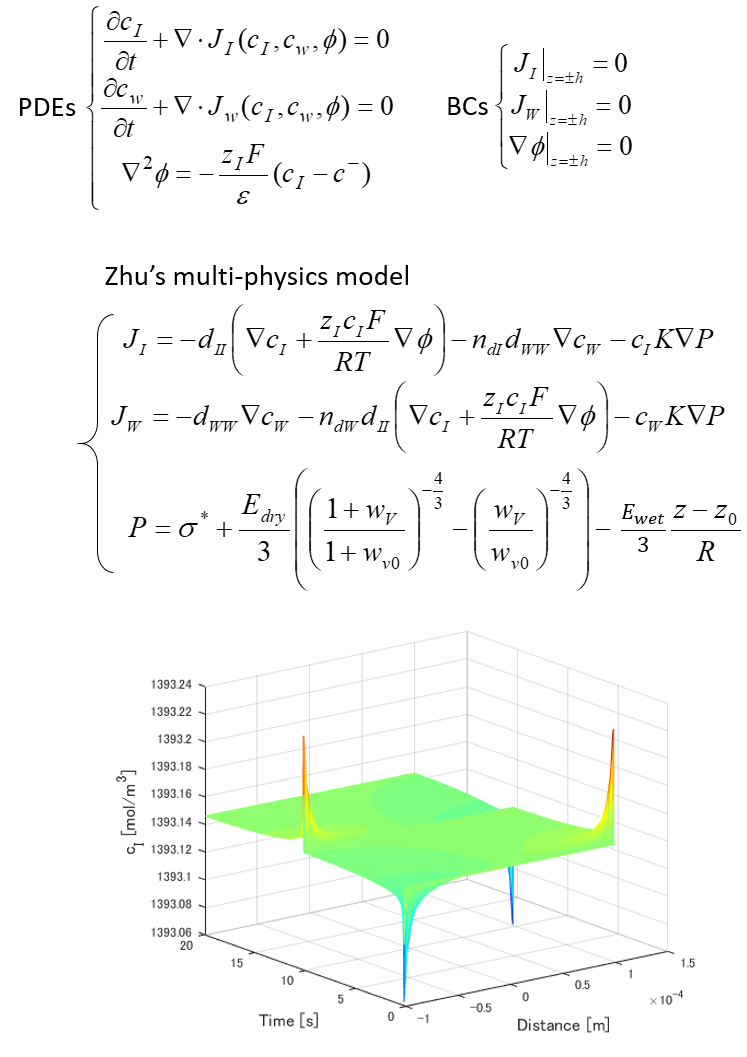 Zhu's IPMC model and step response of the cation(z,t)
Zhu's IPMC model and step response of the cation(z,t)高分子アクチュエータの応用において,シミュレーションや設計,モデルベース開発のためには,物理モデルが重要となります.我々のグループでは,物理原理の解明に向けた特性評価や物理モデル構築とともに,動的システムに対する解析と設計の強力な手法であるシステム制御工学を駆使した数理モデルの近似や物理パラメータの推定などについて研究を行っています.とくに,高分子アクチュエータの物理モデルは非線形偏微分方程式で表されるため,工学的に扱いやすい伝達関数や状態方程式などの形式に近似を行う方法を研究しており,物理ベースの制御指向モデルとして研究しています[解説(JSICE2015)] .
Ionic Polymer-Metal Composite(IPMC)やBucky gelなどのイオン導電性高分子アクチュエータの物理を完全に記述できるようなモデルはまだ研究途上であり,電気化学,流体力学,弾性力学,高分子物理などを用いたモデル化が必要であると考えられます.我々のグループでは,共同研究者とも協力して特性評価と物理モデルの構築を行うとともに,制御指向モデルへの近似とシミュレーションについて研究をしています(図).
Dielectric elastomer(DE)は柔軟電極で挟まれた薄いゴム膜でできたアクチュエータですが,可変な静電容量変化を利用した誘電エラストマー発電器(DEG)としても用いることができます.DEGでは実用上,自動昇圧を行う回路(self-priming circuit)[McKay et al., Smart Mat. Struct.2010]が欠かせないのですが,その数理モデルを構築し,無負荷での最適回路条件を求めることに成功しました.
主な業績
-Z. Zhu, K. Asaka, L. Chang, K. Takagi, H. Chen, Multiphysics of ionic polymer-metal composite actuator, Journal of Applied Physics, 2013
-P. Illenberger, K. Takagi, H. Kojima, U. Madawara, I. Anderson, A mathematical model for self priming circuits: getting the most from a dielectric elastomer generator, IEEE Trans. Power Electronics, 32(9), 6904-6912, 2016
-K. Kondo, K. Takagi, Z. Zhu, K. Asaka, Symbolic finite element discretization and model order reduction of a multiphysics model for IPMC sensors, Smart Materials and Structures, 29(11), 115037 (17 pages), 2020
-K. Ishikawa, K. Asaka, Z. Zhu, T. Hiruta, K. Takagi, The Analytical Solutions to a Cation–Water Coupled Multiphysics Model of IPMC Sensors, Sensors , 26(2), 695, 2026
キーワード
テーマ2:高分子アクチュエータ・センサのロボティクス・メカトロニクス応用
概要
 これまでに開発したIPMC応用:モータと水中ロボット
これまでに開発したIPMC応用:モータと水中ロボット近年,高分子アクチュエータ[解説(JRSJ2019)]を用いた柔軟なロボットへの期待が高まってきています.我々のグループでは,水中で駆動できるIPMC(Ionic Polymer-Metal Composite)アクチュエータのロボット応用,高速で応答する誘電エラストマーアクチュエータの応用,安価で簡易な釣糸人工筋のロボット応用を行っています.
IPMCは数Vの低電圧で駆動可能で,柔軟で大きく変形するという特長をもち,小型水中ロボットの"人工筋肉"やマイクロアクチュエータへの応用が期待されています.これまでに,有限回転モータ,ヘビ型ロボットの水中推進における力学の解析,エイ型ロボットの開発,四足歩行ロボットの開発などを行ってきました(図).
釣糸人工筋とは,ねじってコイル状にしたナイロン糸に熱を加えると可逆的に大きく収縮(10%-20%)する現象[Haines et al., Science(2014)]を利用したアクチュエータです.釣糸などの合成繊維は極めて安価で容易に入手でき,今後のアクチュエータ応用が期待されます.ロボットや支援装具への応用を目指し,我々のグループではその高性能化とモデリング,制御法などについて研究しています.
主な業績
-K.Takagi, M.Yamamura, Z.W.Luo, M.Onishi, S.Hirano, K.Asaka, Y.Hayakawa, Development of a Rajiform Swimming Robot using Ionic Polymer Artificial Muscles, Proc. 2006 IEEE/RSJ IROS, 1861-1866, 2006
-高木 賢太郎,中坊 嘉宏,羅 志偉,向井 利春,IPMCを用いたヘビ型水中ロボットにおける屈曲振幅増大現象のモデル化と解析,システム制御情報学会論文集,19(8),319-326,2006
-K. Takagi, N. Tomita, K. Asaka, A Simple Method for Obtaining Large Deformation of IPMC Actuators Utilizing Copper Tape, Advanced Robotics, 28(7), 513-521, 2014
-T. Arakawa, K. Takagi, K. Tahara, K. Asaka, Position control of fishing line artificial muscles (coiled polymer actuators) from nylon thread, Proc. SPIE, 9798, 97982W, 2016
キーワード
テーマ3:圧電材料・電磁アクチュエータを用いたセンサレス振動制御
概要
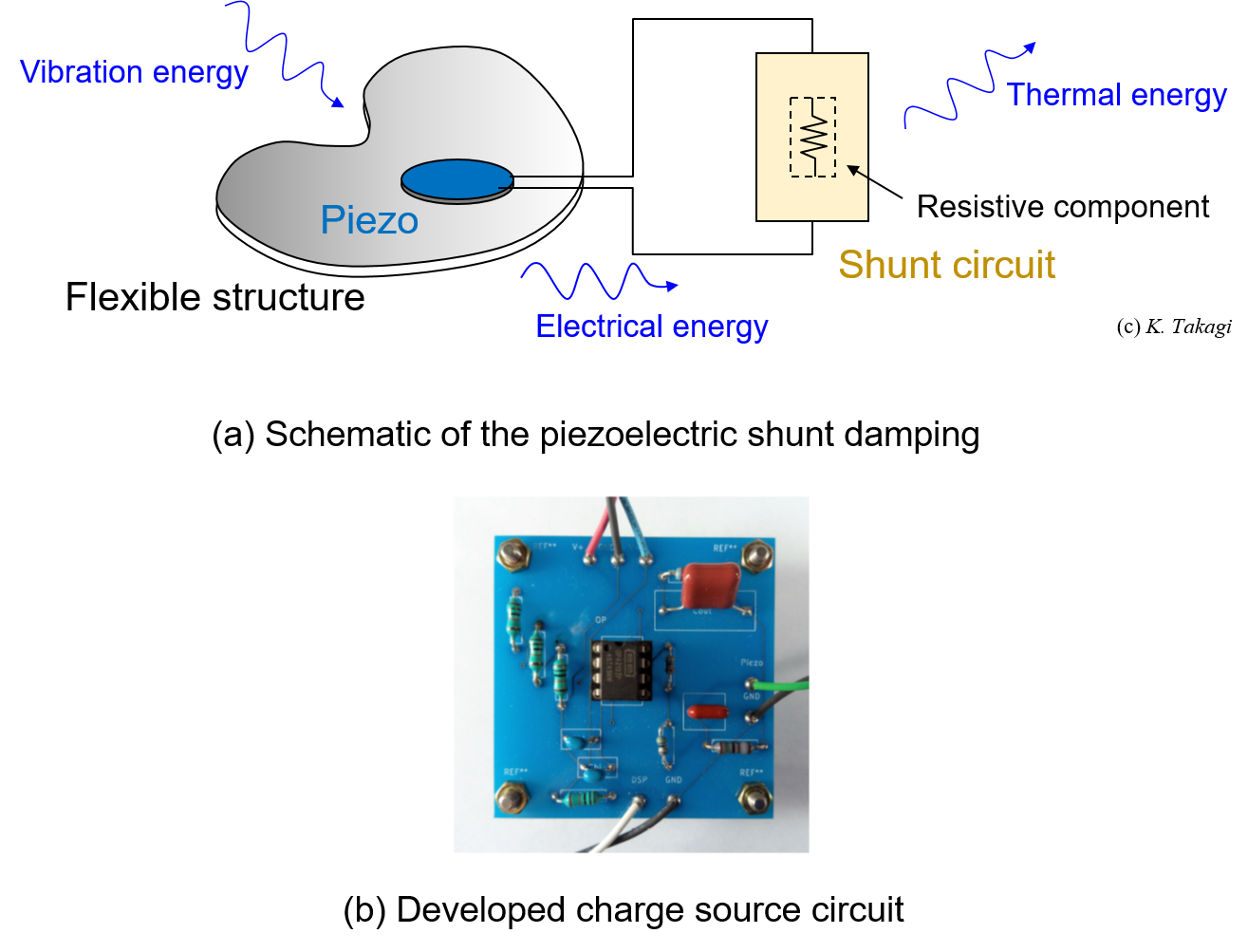 圧電シャント制振:(a)圧電シャント制振の概念図, (b)開発した電圧制御電荷源
圧電シャント制振:(a)圧電シャント制振の概念図, (b)開発した電圧制御電荷源外部電気回路を接続した圧電素子や電磁モータを用いて,センサレスの振動制御を行う手法(シャント制振,shunt damping)があります.これは,素子やモータにより,振動のエネルギーを電気的エネルギーに変換して消散もしくは蓄積することにより,振動が小さくなるというものです(図(a)).機械構造物や自動車部品,モーター,サスペンション,原子間力顕微鏡などへの応用が期待されています.
我々のグループでは,とくに,シャント制振を入出力の取り方が特殊な制御系として捉え,物理原理に基づく数理モデルのパラメータ推定や,制御系の解析と設計,ならびに電子回路実装(図(b))などについて研究しています.
主な業績
-高木賢太郎,山田靖高,井上剛志,内部抵抗を考慮した圧電素子のインピーダンス計測のみに基づくセンサレスパラメータ推定,日本機械学会論文集C編,78(792),2808-2823,2012
-T. Ikegame, K. Takagi, T. Inoue, I. Jikuya, Sensorless parameter estimation of electromagnetic transducer considering eddy currents, Mechatronics, 45, 130-142, 2017
-T. Ikegame, K. Takagi, T. Inoue, Exact Solutions to H infinity and H2 Optimizations of Passive Resonant Shunt Circuit for Electromagnetic or Piezoelectric Shunt Damper, ASME Journal of Vibration and Acoustics, 141(3), 031015(15pages), 2019
キーワード
担当授業科目名(科目コード)
制御工学(B11620040),応用数学IV(B1161014a, B1161014b, B1163022a, B1163022b),現代制御特論(M21623120),先端メカトロニクス(D31030110)
その他(受賞、学会役員等)
計測自動制御学会 SI部門 ソフトマテリアル応用部会 主査(2019-2020)
日本機械学会 機械力学計測制御部門 幹事(2019)