
高橋 淳二(たかはし じゅんじ)

| 所属 | 機械工学系 |
|---|---|
| 兼務 | 人間中心アグリテック共創センター 次世代半導体・センサ科学研究所 社会連携推進センター |
| 職名 | 准教授 |
| 専門分野 | ロボティクス、メカトロニクス、システム工学 |
| 学位 | 博士(工学)(名古屋大学) |
| 所属学会 | 日本ロボット学会 / 日本機械学会 / 計測自動制御学会 / 米国電気電子工学会(IEEE)) |
| takahashi@me ※アドレスの末尾に「.tut.ac.jp」を補完してください |
|
| 研究室web | https://tlab-tut.github.io/tlab-site/ |
| 研究者情報(researchmap) | 研究者情報 |
テーマ1:クラウド型定位インフラストラクチャシステムの構築
概要
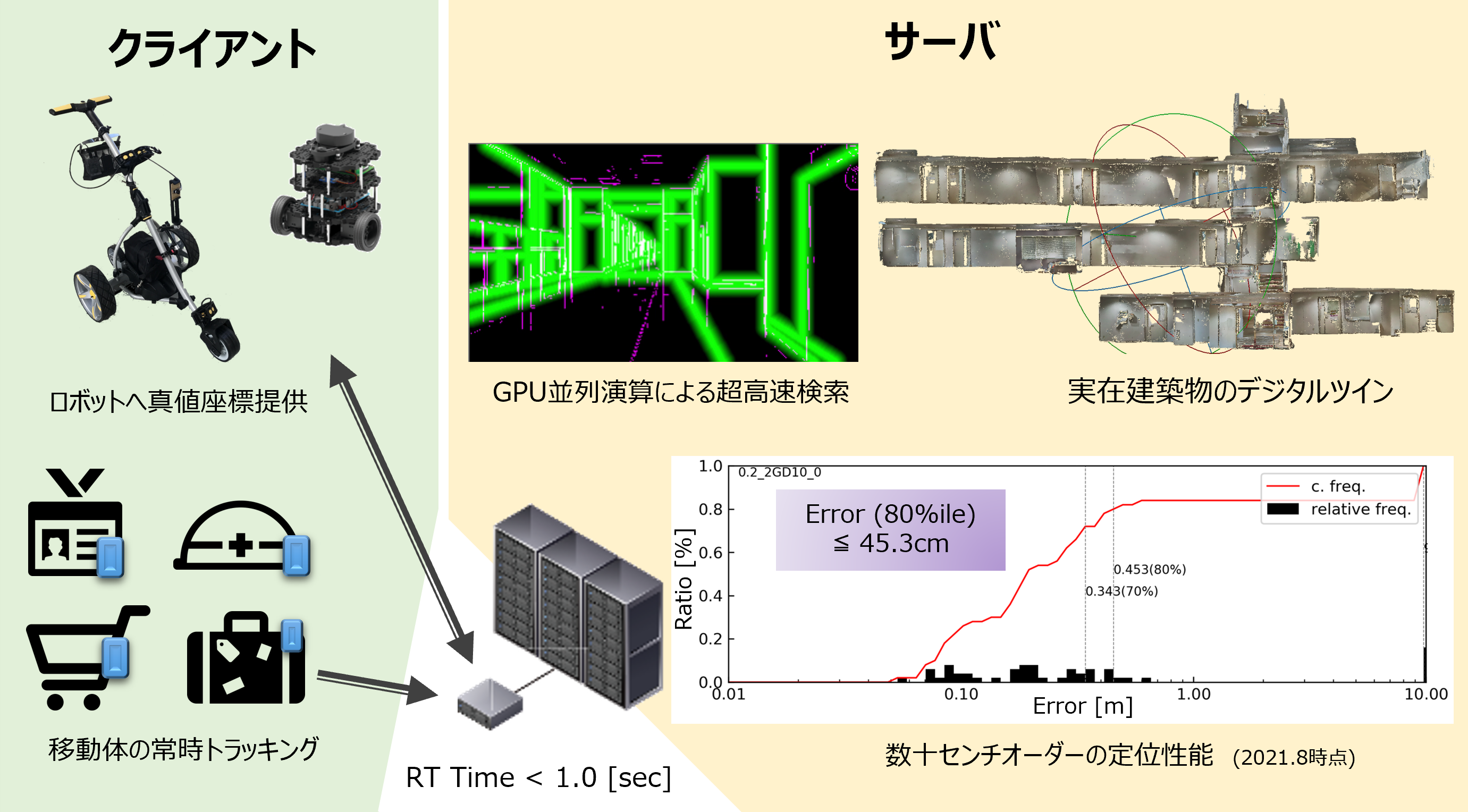 クラウド型定位インフラシステムの全体像
クラウド型定位インフラシステムの全体像 これまでのところロボティクスやIoTによる生産現場の自動化や効率化は、潤沢な資本を持つ大企業に限られています。その原因は自動化に必須の移動体(ロボットや人)の定位(位置推定)にかかるコストが大きいためです。本研究では、特に採算性に優れる新しい定位技術として、環境への物理的なインフラストラクチャの敷設が不要なサーバ・クライアント型の定位システムを開発します。クライアントはセンシングデータをクエリとしてサーバへ位置を問い合わせ、サーバは事前準備した座標付き画像DB群から最類似画像をGPUの並列演算により高速に検索し座標値を返します。目下の目標は、定位精度10cm以内、応答時間1秒以内の実現です。
この定位技術は、導入コストと運用コストを低く抑えたまま、生産圏(工場、倉庫)や生活圏(大学、病院、地下街、駅、空港、複合施設)に導入可能で、フリスクサイズのクライアントモジュールを備えた移動体を10cmのオーダーで永続的に定位・トラッキングできます。物品搬送の自動化はもちろんのこと、人物・移動体の恒常的な追跡・記録による動態分析への利用、定位サービスのサブスクリプション提供によるシェアリングエコノミーの活性化、ライフログ、行動変容、EBPM、行動的生体認証による新しいセキュリティサービス、など新産業創出の基盤となることが期待できます。
主な業績
1. Junji Takahashi, Masato Kawabe, Seiya Ito, Naoshi Kaneko, Wataro Takahashi, Toshiaki Sakamoto, Akihiro Shibata, and Yong Yu: Image-retrieval Method Using Gradient Dilation Images for Cloud-based Positioning System with 3D Wireframe Map, Sensors and Materials, Vol.32, No.2, pp.611-623, 2020.2.
2. Tomoya Kaneko, Junji Takahashi, Seiya Ito, and Yoshito Tobe: A Hybrid Map with Permanent 3D Wireframes and Temporal Line Segments toward Long-term Visual Localization, SICE Journal of Control, Measurement, and System Integration, Vol.12, No.4, pp.149-155, 2019.7.
3. Junji Takahashi, Kohei Shimmra, Yong Yu, Akihiro Shibata, Toshiki Sakamoto: Simulation study of allowance-difference between an environment and a map for visual localization, Proc. in the 15th International Conference on Intelligent Environments, 3-3, Rabat (Morocco), June 2019.6.
4. Wataro Takahashi, Junji Takahasi, Yoshito Tobe: Using Wi-Fi Signals for Creating a Clustered Image Database in UMap, in Proc. of the 8th International Workshop on the Reliability of Intelligent Environments, Rabat (Morocco), June 2019.6.
5. Ayari Akada, Junji Takahashi, and Yu Yong: Improvement of Image Retrieval-based Visual Localization Using Structured Database, in Proc. of IEEE Int. Work. on Mobile Ubiquitous Systems, Infrastructures, Communications and Applications, Kyoto(Japan), pp.601-606, 2019.3.
6. Kusuno Yoshiki, Junji Takahashi, Yu YONG: A Method Localizing an Omnidirectional Image in Pre-Constructed 3D Wireframe Map, in Proc. of IEEE/SICE Int. Symp. of System Integration, Paris (France), pp.325-329, 2019.1.
キーワード
担当授業科目名(科目コード)
応用数学II
統計解析
実務訓練(PBL)
理工学実験
システム最適化特論
システム・計測特論