
中村 純哉(なかむら じゅんや)

| 所属 | 情報メディア基盤センター |
|---|---|
| 兼務 | 情報・知能工学系 |
| 職名 | 准教授 |
| 専門分野 | 分散アルゴリズム,分散システム,耐故障 |
| 学位 | 博士(情報科学)(大阪大学) |
| 所属学会 | 電子情報通信学会,情報処理学会,IEEE,IEEE Computer Society |
| junya@imc ※アドレスの末尾に「.tut.ac.jp」を補完してください |
|
| 研究室web | https://dsl.cs.tut.ac.jp |
| 研究者情報(researchmap) | 研究者情報 |
研究紹介
分散システムにおける耐故障技術に興味があります。特に、Byzantine Fault Toleranceという高度な故障耐性を実現するために用いられる分散合意アルゴリズムや、仮想化技術の活用による弾力的で効率的なレプリケーションの実現について、研究を進めています。
テーマ1:Byzantine Fault-Tolerance
概要
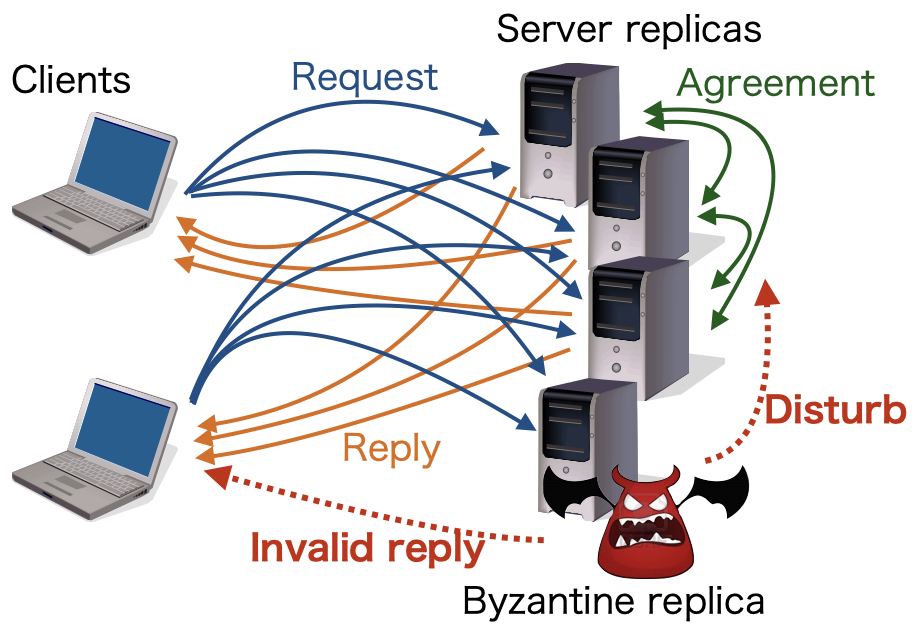
分散システム内の故障したノードは予期しない動作をすることがあります. また,悪意ある攻撃者にノードが乗っ取られた場合には,処理を妨害する動きをするかもしれません. このような振る舞いはビザンチン故障としてモデル化されます. Byzantine Fault Toleranceは,たとえ一部のノードがビザンチン故障しても,分散システム全体はサービス提供を継続できるレプリケーション技術として知られ,ブロックチェーン(分散台帳)や分散データベースのコア技術として広く利用されています. 本研究室では,パブリッククラウドを活用した世界を跨ぐ広域Byzantine Fault Toleranceの実用化を目指して,様々な技術の研究開発に取り組んでいます.
主な業績
T. Chiba, R. Ohmura and J. Nakamura: “A State Transfer Method That Adapts to Network Bandwidth Variations in Geographic State Machine Replication”, Proceedings of the 9th International Symposium on Computing and Networking (CANDAR), pp. 88–94 (2021).
S. Numakura, J. Nakamura and R. Ohmura: “Evaluation and Ranking of Replica Deployments in Geographic State Machine Replication”, Proceedings of the 38th International Symposium on Reliable Distributed Systems Workshops (SRDSW), pp. 37–42 (2019).
J. Nakamura, T. Araragi, S. Masuyama and T. Masuzawa: “Efficient Randomized Byzantine Fault-Tolerant Replication based on Special Valued Coin Tossing”, IEICE Transactions on Information and Systems, E97-D, 2, pp. 231–244 (2014).
キーワード
テーマ2:機械学習によるネットワーク侵入検知システム
概要
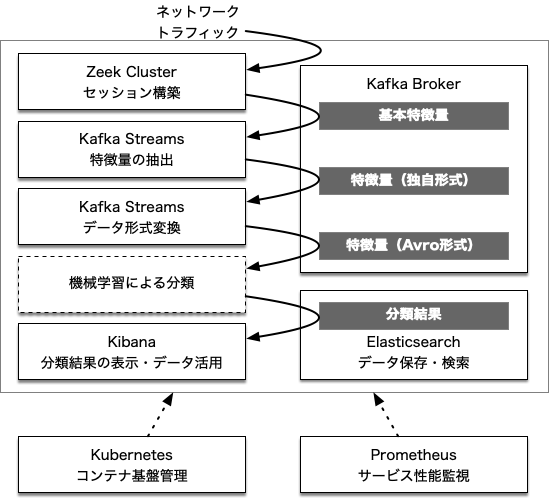
ネットワークを経由したサーバへの不正侵入攻撃は年々増加しています. そのような攻撃を検知・遮断するための仕組みとして,ネットワーク型侵入検知システムが広く使われています. ところが多くのシステムはパターンファイルによって攻撃を検知するため,新しい種類の攻撃には対応できません. この問題を解決するため,機械学習を利用した侵入検知システムの研究が進んでいます. 本研究室では,機械学習を利用した侵入検知システムを実現するための分散処理フレームワークMLNIDSを提案しました. このフレームワークの実用性について,検知率や処理性能,長期運用の安定性など,様々な観点から検証・改善していきます.
主な業績
多田, 中村, 大村, 小林:“機械学習ベースNIDS構築のための分散処理フレームワーク”, 情報処理学会論 文誌, 60, 9, pp. 1448–1465 (2019).
キーワード
テーマ3:自律移動ロボット協調動作の理論的解析
概要
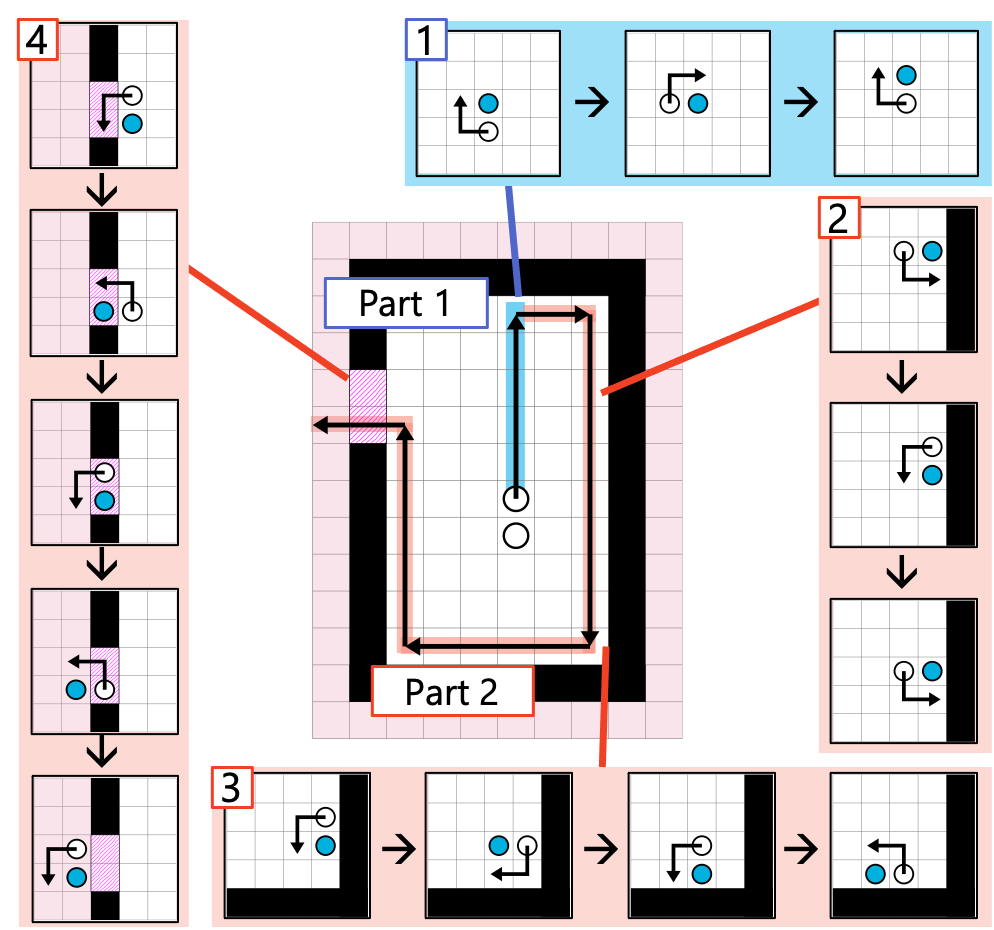
新しい分散システムの実現形態として,自律的に環境を移動して情報収集する移動ロボットが注目を集めています. 個々の自律移動ロボットは限られた機能しか持ちませんが,複数のロボットが個々に集めた情報を持ち寄り協調することで,高度なタスクを達成できます. 本研究室では,理論計算機科学の観点から,タスクを達成するために必要となるロボットの機能や時間複雑度を明らかにすることを目指します. ロボットのモデルは,メモリや通信機能の有無や,フィールドの定義(連続・離散平面)など,様々なバリエーションがあります.
主な業績
J. Nakamura, S. Kamei and Y. Yamauchi: “Evacuation from various types of finite two-dimensional square grid fields by a metamorphic robotic system”, Concurrency and Computation: Practice and Experience, p. e6628 (2021).
Y. Sudo, M. Shibata, J. Nakamura, Y. Kim and T. Masuzawa: “Self-stabilizing Population Protocols with Global Knowledge”, IEEE Transactions on Parallel and Distributed Systems, 32, 12, pp. 3011–3023 (2021).
J. Hirose, J. Nakamura, F. Ooshita and M. Inoue: “Weakly Byzantine Gathering with a strong team”, IEICE Transactions on Information and Systems, E105-D, 3, pp.451-555 (2022).
キーワード
担当授業科目名(科目コード)
ICT基礎
その他(受賞、学会役員等)
2021年11月 Outstanding Paper Award. The Ninth International Symposium on Computing and Networking (CANDAR'21).
2021年9月 優秀研究賞. 第17回情報科学ワークショップ.
2020年11月 Outstanding Paper Award. The Eighth International Symposium on Computing and Networking (CANDAR'20).