
長谷川 孔明(はせがわ こうめい)

| 所属 | 情報・知能工学系 |
|---|---|
| 職名 | 助教 |
| 専門分野 | ヒューマンエージェントインタラクション / 社会的ロボティクス / インタラクションデザイン |
| 学位 | 博士(工学)(筑波大学) |
| 所属学会 | IEEE / 人工知能学会 / 日本ロボット学会 |
| hasegawa@cs ※アドレスの末尾に「.tut.ac.jp」を補完してください |
|
| 研究室web | https://www.icd.cs.tut.ac.jp |
| 研究者情報(researchmap) | 研究者情報 |
研究紹介
人と人工物のインタラクションの仕組みのデザインや、人と人とのコミュニケーションを支援するシステムの研究を行っています。 Human-Agent Interaction(HAI)やHuman-Robot Interaction(HRI)が専門分野です。 インタフェースや認知科学の分野にも興味があります。
テーマ1:テレプレゼンスロボットと遠隔多人数会話
概要
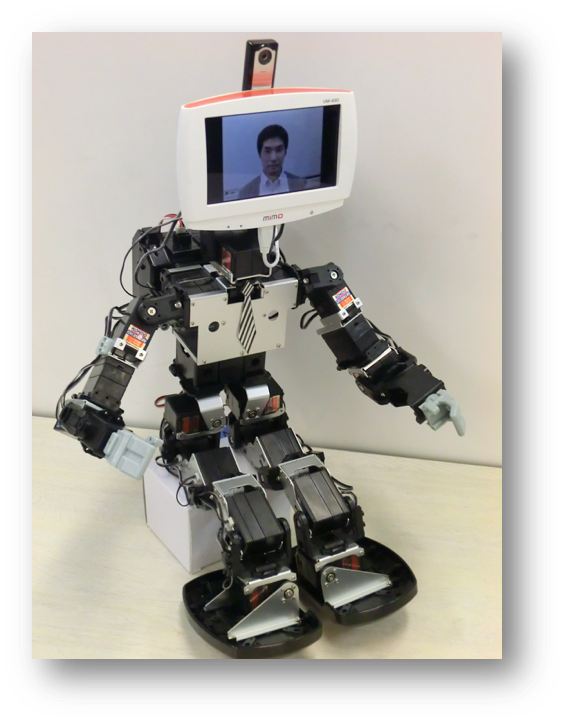 遠隔会議用テレプレゼンスロボット
遠隔会議用テレプレゼンスロボット遠隔での多人数会話の環境である遠隔会議において、遠隔参与者の発話機会が減少す るという問題が生じる。これを解決するために、身ぶりを誇張するテレプレゼンスロボットを提案した。会話の際に参与役割が定義されており、聞き手の役割になっていた参与者が次話者になりやすいといわれている。さらに、参与役割の交替には視線方向やうなずきのような非言語情報によって決まるといわれている。遠隔参与者のうなずき等の非言語情報を誇張することによって発話機会を獲得しやすくなると考え、テレプレゼンスロボットに身ぶりを誇張する機能の導入を提案した。提案手法である身ぶりを誇張する条件と、誇張しない条件、既存のビデオチャット条件の3 条件で遠隔会議を行う実験を実施し、身ぶりの誇張が発話交替に与える影響を検証した。
主な業績
長谷川孔明, 中内靖, "テレプレゼンスロボットによる無意識的身ぶりの表出が発話交替に与える影響", 日本機械学会論文集, Vol.80, No.819, p. DR0321, 2014.
キーワード
テーマ2:人と相互適応する人工物(パーソナルモビリティ, 電動車椅子)
概要
 自律走行電動車いすの実験の様子
自律走行電動車いすの実験の様子自動運転技術の発達にともなって自律走行車への期待が高まっている。自動運転の技術の次に、ドライバーと走行車の関係の研究を行っていくことが重要になる。特に、人が走行車に適応する過程に関する研究が重要である。
機械学習の手法は運転者のモデルを獲得する必要があるが、一方で、そこで生じる運転者と走行車の関係には2種類のタイプが存在する。走行車が人の体の一部として捉えられる場合と、人と独立に自律して動くと捉えられる場合である。自律走行する電動車いすを用いて、走行車のどのような要因がこれら二つの違いに繋がるのか研究を行った。
主な業績
Komei Hasegawa, Seigo Furuya, Yusuke Kanai, Michita Imai, “DECoReS: Degree Expressional Command Reproducing System for Autonomous Wheelchairs”, The 3rd International Conference on Human-Agent Interaction, pp.149-156, 2015.
キーワード
テーマ3:ロボットとの〈並ぶ関係〉と相互適応
概要
 人と手をつなぎ並んで歩くロボット〈マコのて〉
人と手をつなぎ並んで歩くロボット〈マコのて〉今までの人とロボットのコミュニケーションの研究では、人からの問いかけや挨拶に答えたり、「そこの箱をとって」といった依頼を遂行したり、〈対峙しあう関係〉を想定してきた。
しかし、人同士のコミュニケーションでは、公園を一緒に手をつなぎながら散歩する時など、いつの間にかお互いの歩調が合ってきて、相手の気持が伝わってきたり、自分の気持ちも相手に伝わっているように感じることがある。こうした場面では、〈対峙しあう関係〉ではなく、お互いは〈並ぶ関係〉にあるといえる。〈並ぶ関係〉は、何かを共有し、お互いに調整し合うことを指向しているといえる。
人と一緒に手をつなぎながら並んで歩くロボット〈マコのて〉を用いて、〈並ぶ関係〉の構築を目指す。〈並ぶ関係〉では、一緒に歩こうとする中で、はじめはギクシャクとしてしまう。だが、一緒に歩くなかで、だんだん相手の癖や好みも分かってくる。同時に、自分の好みも伝わっているような気がする。互いに適応をくりかえすなかで、その行動パターンや好みが一致し、はじめのギクシャクとした感じがとれてくる。このように、互いに適応し合う「相互適応」の仕組みをロボットに持たせることで人とロボットの〈並ぶ関係〉を実現する。