
菅谷 保之(すがや やすゆき)

| 所属 | 情報・知能工学系 |
|---|---|
| 職名 | 准教授 |
| 専門分野 | コンピュータビジョン |
| 学位 | 博士(工学)(筑波大学) |
| sugaya@cs ※アドレスの末尾に「.tut.ac.jp」を補完してください |
|
| 研究室web | http://www.iim.cs.tut.ac.jp/ |
| 研究者情報(researchmap) | 研究者情報 |
テーマ1:ビデオ画像からの物体の全周3次元復元
概要
 赤:追跡した点、緑:推定した点
赤:追跡した点、緑:推定した点本研究ではビデオ画像から物体の全周3次元形状を復元する際のさまざま
な問題に取り組んでいます。
1. 誤追跡点の検出および修正
ビデオ画像上で追跡した特徴点から誤った追跡を検出し, その誤りを修正する研究を行っています。これは追跡した特徴点軌跡があるアフィン空間上に拘束されることを利用したもので, そのアフィン空間を推定し, 推定したアフィン空間に対する誤差の大きい軌跡を誤追跡として検出する. また, その軌跡を推定したアフィン空間に含まれるように修正することで, 誤った追跡部分を正しく推定し直します。
2. 三角形メッシュの統合
複数の視点から撮影された画像上で独立に定義された三角形メッシュを統合する際に生じる重なり部分での三角形パッチの形状の違いを修正する研究を行っています。この研究では, 修正が必要な三角形パッチを検出し, 隣り合った三角形パッチの辺を入れ換えることで三角形パッチを再構成する手法を提案しています。
キーワード
テーマ2:高精度な楕円検出と円弧マーカーを用いた仮想物体表示システムの構築
概要
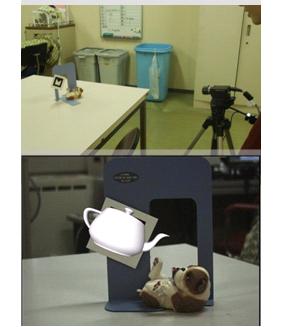
我々は高精度な楕円当てはめと楕円検出方法について研究しています。画像から楕円を検出するには、まず画像からエッジを抽出して、抽出したエッジ点列に楕円を当てはめる。このとき、楕円を当てはめる点列に楕円弧以外の点があると楕円当てはめの精度が低下する。この問題を解決するために, 我々はランダムサンプリングを行うことなく, アウトライアを含んだ点列から正しい楕円を当てはめる方法を提案しています。
また, 円形マーカーを利用した複合現実感システムの開発も行っている。このシステムでは、我々が提案する楕円検出手法を使って画像中から楕円を安定して検出し、検出した楕円パラメータからカメラの位置姿勢を計算して仮想物体を画像中に合成する。
キーワード
その他(受賞、学会役員等)
- 超平面の当てはめによるビデオ画像からの運動物体の分離
- セミマーカーレスMR
- 隠消現実感システム