
福村 直博(ふくむら なおひろ)

| 所属 | 情報・知能工学系 |
|---|---|
| 職名 | 教授 |
| 専門分野 | 計算論的神経科学 |
| 学位 | 博士(工学)(豊橋技術科学大学) |
| 所属学会 | 電子情報通信学会 / 日本神経回路学会 / 日本ロボット学会 |
| fukumura@cs ※アドレスの末尾に「.tut.ac.jp」を補完してください |
|
| 研究室web | http://www.bmcs.cs.tut.ac.jp |
| 研究者情報(researchmap) | 研究者情報 |
研究紹介
ヒトなどの生体は視覚などの感覚器官から得た多くの感覚情報を統合して外界の情報を知覚し、それを基に柔軟な運動を行なうことで、外界の状況に対処しています。このような生体の脳の高次機能である感覚-運動情報統合の機能を計算論的神経科学の立場から理解する事を目指し、対象物認知の過程やその認知に基づく手や腕の運動を計測する心理物理実験を行ないます。さらに生理学的な知見も取り入れてそれらの情報処理機能を再現する数理モデルを構築することで、ヒトのもつ柔軟な情報処理の仕組みを探ります。さらにその数理モデルを応用した、柔軟で人に優しいシステムの実現を目指しています。
テーマ1:ヒト腕の随意運動の計算論的研究
概要
 図1.腕運動計測システム
図1.腕運動計測システムヒトは複雑な外界の情報から運動に必要な情報を抽出し、それを基に適切な手足の動かし方を選択し、制御するという情報処理によって運動を行っています。例えば、我々がコップで水を飲む動作を実行するためには、コップの情報の認知、手先をコップの位置まで移動するための腕の運動制御、さらにコップの把持における様々な計算問題を解く事で実現できています。このような巧みで複雑な運動であるヒトの到達把持運動の計算問題がどのように解かれているかを調べるために、まず、モーションキャプチャーなどでヒトの運動軌道を計測する心理物理実験を行い、さらにその解析結果からヒトの運動制御の情報処理過程を数理モデル化して、ヒトの運動の生成原理や制御方式などを明らかにする研究を進めています。さらにそのモデルを用いた義手システムの検討などを行っています。
[主な業績]
松田基,片山哲,福村直博, “VAEを用いた視覚-運動変換モデルによる多指ロボットハンドでのコップの把持運動制御,” 電子情報通信学会論文誌 D Vol.J107-D No.2 pp.67-76
Fukumura, N., Otane, S., Uno, Y., and Suzuki, R.,“A Neural Network Model for Extracting Correlated Information in Sensory Integration,” Proceedings of International Conference on Neural Information Processing, Vol.2, pp.873-876 1998
キーワード
テーマ2:ヒトの運動学習原理の解明
概要
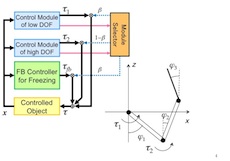 図2.モジュール構造を用いたヒト腕による倒立振子制御のための多自由度運動学習システム
図2.モジュール構造を用いたヒト腕による倒立振子制御のための多自由度運動学習システム人が巧みな運動ができる大きな要因は、その柔軟な運動学習能力です。我々は、様々な条件下で新しい運動を学習する事ができます。その1つの方法は、自分で試行錯誤しながら学習する方法です。これを「強化学習」と言います。他に、他人のやっている運動を真似る方法もあります。これは「見真似学習」です。これらの枠組みで学習をするときの学習途中の運動を計測・解析することで、運動学習の原理の解明を目指します。さらにこのような学習過程を計算機上で再現し、適当な課題を学習する過程をシミュレーションする、あるいは実ロボットに実装して検証します。
[主な業績]
森裕紀,大濱吉紘,福村直博,宇野洋二, “Forward-propagation則による実ロボットの逆ダイナミクス学習,” 電気学会論文誌(C), Vol.125, No.12, pp.1861-1870 2005
Fukumura, N., Wakaki, K., and Uno,Y., “A Modular Structure of Auto-encoder for the Integration of Different Kinds of Information”, Proceedings of 1st International Conference on Natural Computation, pp.313-321 2005
キーワード
担当授業科目名(科目コード)
理工学実験 / 制御工学 / 生体情報システム特論
その他(受賞、学会役員等)
Rubber Hand Illusionなどの異種感覚情報統合実験と、数理モデルの構築