
Hayashi, Kotaro

| Affiliation | Department of Computer Science and Engineering |
|---|---|
| Title | Assistant professor |
| Fields of Research | Human-robot interaction / Cognitive science / Sociology |
| Degree | Doctor of Engineering (Nara Institute of Science and Technology) |
| Academic Societies | Robotics Society of Japan |
| hayashik@cs Please append ".tut.ac.jp" to the end of the address above. |
|
| Laboratory website URL | http://www.aisl.cs.tut.ac.jp/ |
| Researcher information URL(researchmap) | Researcher information |
Research
Theme1:The behavior which robots should have in the real environment
Overview
 Field experiment in a mall
Field experiment in a mallIt is difficult to predict what will happen in the real environment with people in contrast to the controlled environment such as the factory or the warehouse. However, a robot in the real environment must respond to the unexpected events. To make robots do it, I research the Technogym senses behaviors of people and the robot system respond to the interaction in the real environment.
Selected publications and works
Kotaro Hayashi, Masahiro Shiomi, Takayuki Kanda & Norihiro Hagita, "Friendly Patrolling: A Model of Natural Encounters," In Proceedings of Robotics: Science and Systems (RSS2011), p. 18, 2011
Kotaro Hayashi, Masahiro Shiomi, Takayuki Kanda & Norihiro Hagita "Who is appropriate? A robot, human and mascot perform three troublesome tasks," In 19th International Symposium in Robot and Human Interactive Communication (ROMAN2010), pp. 348–354, 2010
doi:10.1109/ROMAN.2010.5598661
Kotaro Hayashi, Daisuke Sakamoto, Takayuki Kanda, Masahiro Shiomi, Satoshi Koizumi, Hiroshi Ishiguro, Tsukasa Ogasawara & Norihiro Hagita, "Humanoid robots as a passive-social medium," In Proceeding of the ACM/IEEE international conference on Human-robot interaction (HRI2007), pp. 137–144, 2007
doi:10.1145/1228716.1228735
Kotaro Hayashi, Takayuki Kanda, Takahiro Miyashita, Hiroshi Ishiguro & Norihiro Hagita, "Robot manzai - robots’ conversation as a passive social medium," In 5th IEEE-RAS International Conference on Humanoid Robots (Humanoids2005). pp. 456–462, 2005.
doi:10.1109/ICHR.2005.1573609
Keywords
Theme2:The "Human-likeness" on the Human-robot collaboration
Overview
 Go/NoGo task experiment by a person and a robot
Go/NoGo task experiment by a person and a robotRobots can be modified to the best shape fixed to the task. In the human-robot collaboration, what shape the robots must have? I research the "Human-likeness" that robots needs in the human-robot collaboration.
Selected publications and works
Kotaro Hayashi, & Ikuo Mizuuchi, "Investigation of Joint action: Eye Blinking Behavior Improving Human-Robot Collaboration," In Proceedings of 26th IEEE International Symposium on Robot and Human Interactive Communication (RO-MAN), pp.1133--1139, 2017
Keywords
Theme3:The behavior of the robot to go Into the human community
Overview
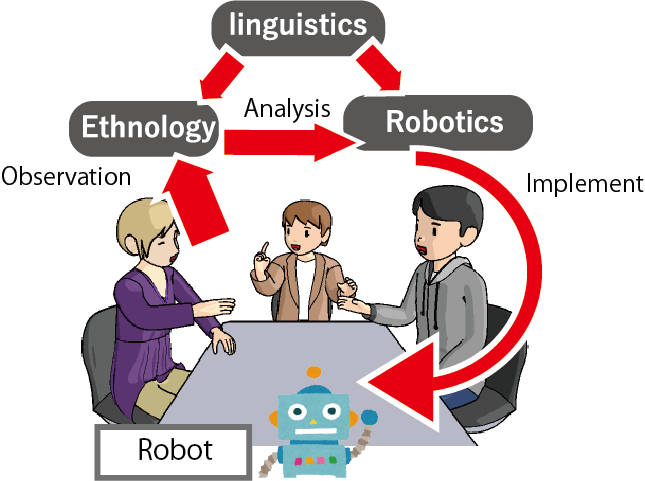 The image of the robot in the human community
The image of the robot in the human communityThe communities such as hospitals, companies and schools wants robots to play do many tasks. How must a robot do to become not so much a tool but a member of the community. By putting robots in a community of people with same roles and using the knowledge of the ethnology, I research the mechanism that a existence become a member of a community.
Selected publications and works
Iris Howley ,Takayuki Kanda, Kotaro Hayashi & Carolyn Rosé, "Effects of social presence and social role on help-seeking and learning," In Proceedings of the 2014 ACM/IEEE international conference on Human-robot interaction (HRI2014), pp. 415–422, 2014.
doi:10.1145/2559636.2559667
Keywords
Title of class
Laboratory Experiments in Computer Science and Engineering
Others (Awards, Committees, Board members)
In Proceeding of the ACM/IEEE international conference on Human-robot interaction – (HRI ’07) best paper