
Takagi, Kentaro

| Affiliation | Department of Mechanical Engineering |
|---|---|
| Title | Professor |
| Fields of Research | Actuators, Control engineering |
| Degree | Dr. Eng. (Nagoya University) |
| Academic Societies | JSME, SICE, ISCIE, RSJ, IEEE |
| takagi@me Please append ".tut.ac.jp" to the end of the address above. |
|
| Laboratory website URL | https://smr.me.tut.ac.jp/ |
| Researcher information URL(researchmap) | Researcher information |
Research
Smart materials such as piezoelectric material, electro-mechanically active polymers (EAPs), thermo-mechanically active polymer fibers (or fishing-line artificial muscles) are recently paid much attentions due to their attractive nature as soft materials. My research interest includes smart materials based actuators and sensors, its modeling, control, and robotics applications.
- Modeling and control of polymer actuators and sensors
- Robotics and mechatronics applications of polymer actuators and sensors
- Sensor-less vibration control using piezoelectric materials and electromagnetic transducers
Theme1:Modeling and control of polymer actuators and sensors
Overview
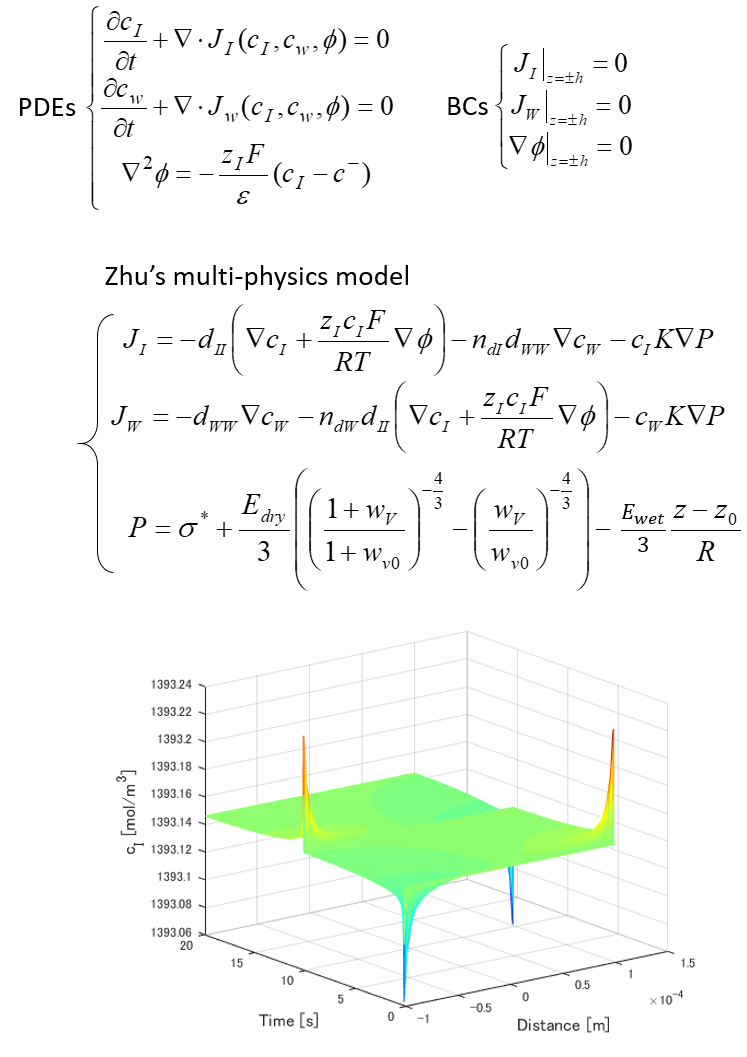 Zhu's IPMC model and step response of the cation(z,t)
Zhu's IPMC model and step response of the cation(z,t)In the application of polymer actuators, physical models are important for simulation, design, and model-based design. Our group is concerned with the characterization and the construction of physical models for the elucidation of physical principles, as well as the approximation of mathematical models and the estimation of physical parameters using system control engineering, which is a powerful method of analysis and design for dynamical systems.
Selected publications and works
-Z. Zhu, K. Asaka, L. Chang, K. Takagi, H. Chen, Multiphysics of ionic polymer-metal composite actuator, Journal of Applied Physics, 2013
-P. Illenberger, K. Takagi, H. Kojima, U. Madawara, I. Anderson, A mathematical model for self priming circuits: getting the most from a dielectric elastomer generator, IEEE Trans. Power Electronics, 32(9), 6904-6912, 2016
-K. Kondo, K. Takagi, Z. Zhu, K. Asaka, Symbolic finite element discretization and model order reduction of a multiphysics model for IPMC sensors, Smart Materials and Structures, 29(11), 115037 (17 pages), 2020
-K. Ishikawa, K. Asaka, Z. Zhu, T. Hiruta, K. Takagi, The Analytical Solutions to a Cation–Water Coupled Multiphysics Model of IPMC Sensors, Sensors , 26(2), 695, 2026
Keywords
Theme2:Robotics and mechatronics applications of polymer actuators and sensors
Overview
 Developed IPMC robotic applications : motor and underwater robots
Developed IPMC robotic applications : motor and underwater robotsIn recent years, expectations for flexible robots using polymer actuators have increased. Our group is developing robots using Ionic Polymer-Metal Composite (IPMC) actuators that can be driven underwater, dielectric elastomer (DE) actuators that respond at high speed, and fishing-line artificial muscles (or twisted and coiled polymer fiber) that can generate large force.
Selected publications and works
-K.Takagi, M.Yamamura, Z.W.Luo, M.Onishi, S.Hirano, K.Asaka, Y.Hayakawa, Development of a Rajiform Swimming Robot using Ionic Polymer Artificial Muscles, Proc. 2006 IEEE/RSJ IROS, 1861-1866, 2006
-K. Takagi, N. Tomita, K. Asaka, A Simple Method for Obtaining Large Deformation of IPMC Actuators Utilizing Copper Tape, Advanced Robotics, 28(7), 513-521, 2014
-T. Arakawa, K. Takagi, K. Tahara, K. Asaka, Position control of fishing line artificial muscles (coiled polymer actuators) from nylon thread, Proc. SPIE, 9798, 97982W, 2016
Keywords
Theme3:Sensor-less vibration control using piezoelectric materials and electromagnetic transducers
Overview
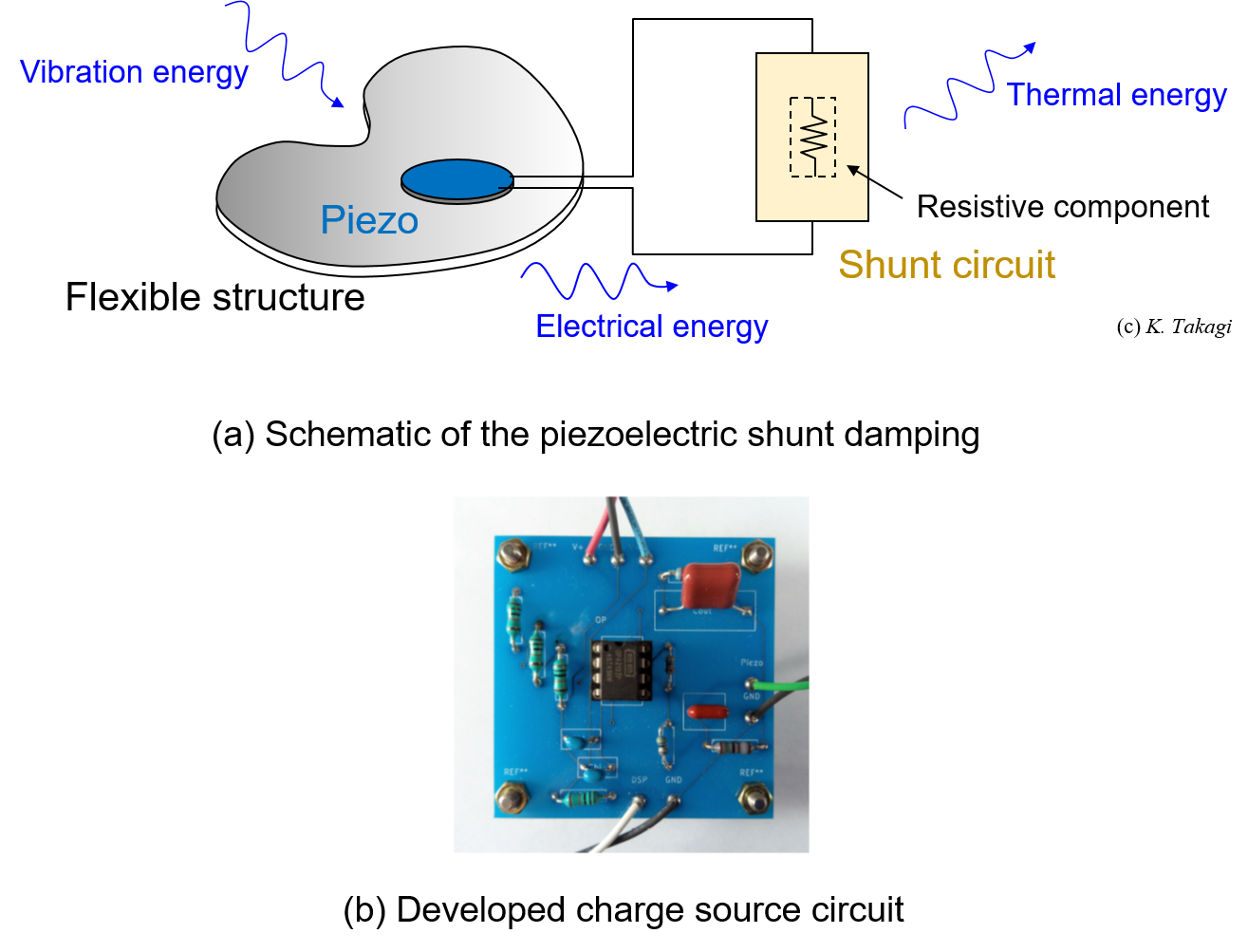 Piezoelectric shunt damping : (a)Illustrative explanation, (b) Developed charge source circuit
Piezoelectric shunt damping : (a)Illustrative explanation, (b) Developed charge source circuitShunt damping is a method of sensor-less vibration control using a piezoelectric element or electromagnetic motor connected to an external electric circuit. The transducer transforms the vibration energy into electrical energy and dissipates or accumulates it to reduce the vibration. Shunt damping is expected to be applied to mechanical structures, automobile devices, motors, suspensions, atomic force microscopes, etc.
Our group studies
- muodeling,
- identification,
- control, and
- implementation by electronic circuit
for piezoelectric/electromagnetic shunt damping
Selected publications and works
-T. Ikegame, K. Takagi, T. Inoue, I. Jikuya, Sensorless parameter estimation of electromagnetic transducer considering eddy currents, Mechatronics, 45, 130-142, 2017
-T. Ikegame, K. Takagi, T. Inoue, Exact Solutions to H infinity and H2 Optimizations of Passive Resonant Shunt Circuit for Electromagnetic or Piezoelectric Shunt Damper, ASME Journal of Vibration and Acoustics, 141(3), 031015(15pages), 2019
Keywords
Title of class
Control Engineering(B11620040), Applied Math IV(B1161014a, B1161014b, B1163022a, B1163022b), Advanced Modern Control Theory (M21623120), Advanced Mechatronics (D31030110)
Others (Awards, Committees, Board members)
Chairperson(2019-2020), Technical Committee on Soft Materials, SI division, SICE
Secretary(2019), DMC division, JSME