
Sato, Kaiji

| Affiliation | Department of Mechanical Engineering |
|---|---|
| Title | Professor |
| Fields of Research | Precision Mechatronics / Robotics /Control Engineering/ Actuator |
| Degree | Doctor of Engineering (Tokyo Institute of Technology) |
| Academic Societies | The Japan Society for Precision Engineering / The Japan Society of Mechanical Engineers / IEEE / KSPE |
| sato@me Please append ".tut.ac.jp" to the end of the address above. |
|
| Laboratory website URL | https://www.rm.me.tut.ac.jp/ |
| Researcher information URL(researchmap) | Researcher information |
Research
Our research group aims to achieve practical and excellent motion systems which have high convenience (such as manufacturability , operability and maintainability) and high motion performance such as high precision and high-speed motion, for a wide variety of application fields and contribution to the convenience of the society. For this aim, we have engaged in the following studies;
(a) Mechanisms and actuators for pursuing performances determined by their characteristics rather than the other component characteristics in control systems.
(b) Practical controller design methods for high performance motion by utilizing characteristics of mechanisms and actuators with significant nonlinearity.
(c) Convenient and high-performance sensing system
Theme1:Micro-Manipulator with Wireless Actuators Using Lasers and Thermo-Sensitive Magnetic Material for Operating Microparts and Cells
Overview
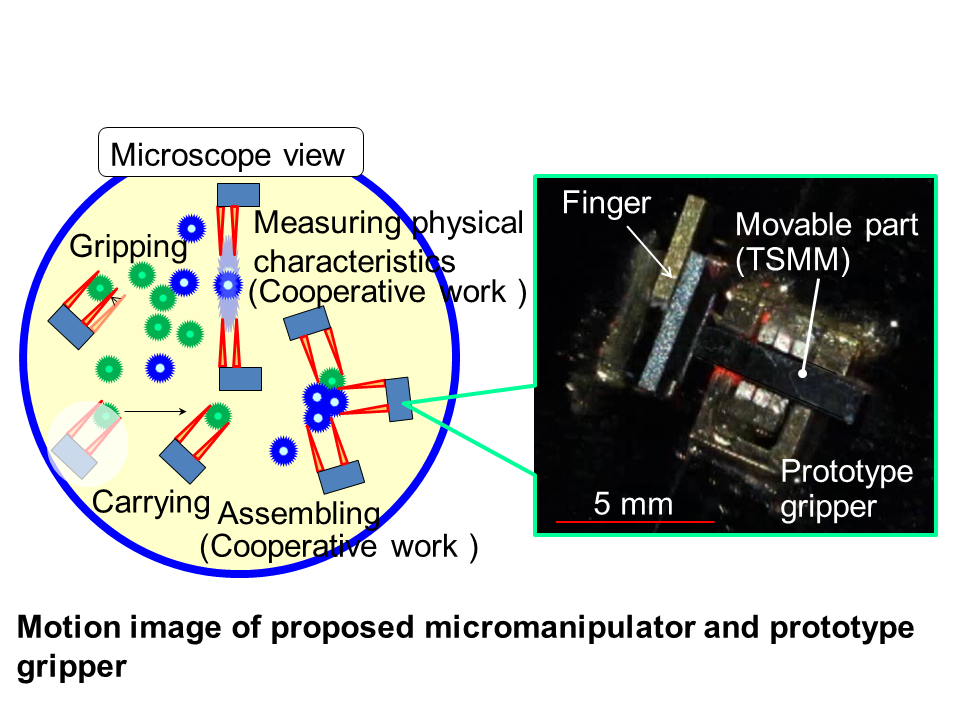
Actuators comprising thermo-sensitive magnetic material (TSMM) parts and permanent magnets (PMs) and using laser beams, have simple structures and are free from wiring problems. In addition, they can receive the driving energy and control signals. These features are suitable for downsizing. Our research group aims to realize a micro-manipulator system that has the following advantages for operation of micro objects such as micro artificial parts, cells and living bodies;
(a) It can operate various types of micro-size objects in air, liquid and boxed-in space.
(b) It is easy to replace the end-effectors of the grippers.
(c) The grippers are so small that many grippers can work together under a microscope.
(d) The driving systems are isolated from the work space and free from the influence of the environment in the work space.
(e) The grippers can provide sufficient force (> 1 mN)
Selected publications and works
1) Kaiji Sato and Tadatoki Shimada : Wireless and Compact Rotary Actuator with Thermo-Sensitive Magnetic Materials for Micro-Manipulator, Proc. of ICPT2016, (Soul, Korea), (2016.11) P-13 ICPT16026_P13.pdf.
2) Tadashi Hama and Kaiji Sato : Positioning Characteristics of the Novel and Compact Actuator Using Temperature Sensitive Magnetic Materials, Proc. of ICPT2016, (Soul, Korea), (2016.11) P-17 ICPT16036_P17.pdf.
Keywords
Theme2:Practical and Intuitive Controller Design for Precision Motion Systems
Overview
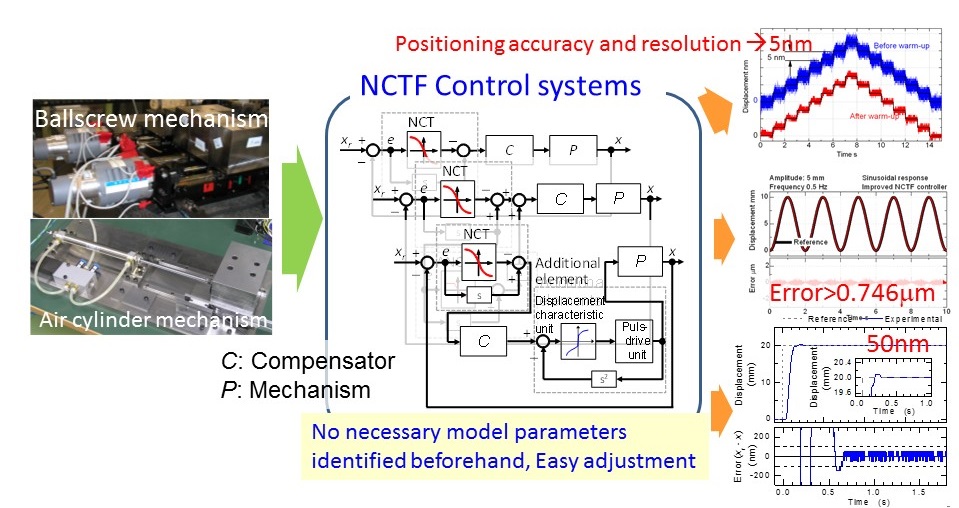 Overview of NCTF control
Overview of NCTF controlNow many motion mechanisms including variety of actuators and mechanical elements are used. Their mechanisms generally have nonlinear characteristics, for example, friction and saturation characteristics, input amplitude / frequency dependency of gains, hysteresis characteristics, force ripple. Their characteristics make the controller design difficult and deteriorate the control system performance. In order to overcome the problems, practical and intuitive control system design procedures for precision positioning and precision motion control of the mechanisms are proposed and evaluated experimentally. The proposed design procedures can be used without special knowledge of control theory, the information of the detailed characteristics and the model parameters prepared beforehand. The proposed design procedures have achieved high precision positioning accuracy such as 5 nm for ball-screw mechanisms, 50 nm for air cylinder mechanisms and better than 1 micrometer for a mechanism with pneumatic artificial muscles.
Selected publications and works
1) Wahyudi, Kaiji SATO and Akira SHIMOKOHBE: Characteristics of Practical Control for Point-to-point(PTP) Positioning Systems Effect of Design Parameters and Actuator Saturation on Positioning Performance, Precision Engineering, Vol.27, No.2, (2003) pp.157-169.
2) Kaiji Sato and Guilherme Jorge Maeda: Practical Ultraprecision Positioning of a Ball Screw Mechanism, International Journal of Precision Engineering and Manufacturing, Vol.9, No.2, (2008) pp.44-49.
3) Guilherme Jorge Maeda and Kaiji Sato: Practical Control Method for Ultra-Precision Positioning Using a Ballscrew Mechanism, Precision Engineering, Vol.32, No.4, (2008) pp.309-318.
4) Kaiji Sato and Yusuke Sano : Practical and Intuitive Controller Design Method for Precision Positioning of a Pneumatic Cylinder Actuator Stage, Precision Engineering, Vol.38, No.4, (2014) pp.703-710.
5) Shin-Horng Chong, Kaiji Sato: Practical and robust control for precision motion: AR-CM NCTF control of a linear motion mechanism with friction characteristics, IET Control Theory & Applications, Vol.9, No.5, (2015) pp.745-754.
6) Shaofei Wang and Kaiji Sato: High-precision motion control of a stage with pneumatic artificial muscles, Precision Engineering, Vol.43, (2016) pp.448-461.
Keywords
Theme3:Precision robot for long-term stable operation
Overview
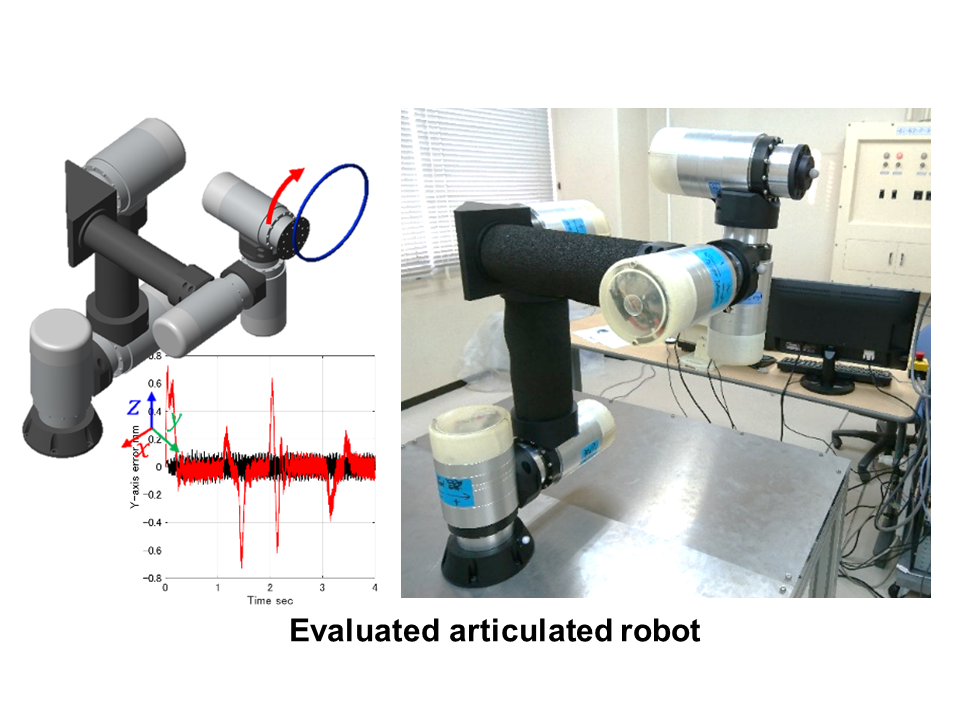
For making affluent and sustainable society amid the downward trend in the labor force population, robots are required to maintain and improve themselves, and they need to be useful over a long time without any problems. In addition, the robots need to provide high precision motion for fine and precise works. To realize the precision robots, the following research subjects are carried out;
(a) Investigation of deterioration factors of motion accuracy in motion mechanisms and practical controller design methods for high precision motion
(b) Simple sensing system which is easy to integrate into motion mechanisms for monitoring their characteristics and states
(c) Method for compensating and improving motion mechanism performance over a long time
Keywords
Title of class
Precision Mechatronics(M41630440), Engineering of Intelligent Robotics(D31030050)
Others (Awards, Committees, Board members)
Other research activities
1) Ultrahigh-acceleration and high velocity linear motor and its precision motion control
2) Linear switched reluctance motor with an easy-fabricated and disposable thin-film mover and it precision motion control
3) Self-alignment of micro-parts using liquid surface tension
4) Novel compact actuators with thermos-sensitive magnetic material
5) Micro-mechanical optical switch using a S-shaped thin film mirror
6) Easy-fabricated electrostatic thin-film actuator and its precision motion control