
Nakamura, Junya

| Affiliation | Information and Media Center |
|---|---|
| Concurrent post | Department of Computer Science and Engineering |
| Title | Associate Professor |
| Fields of Research | Distributed Algorithms, Distributed Systems, Fault-Tolerance |
| Degree | Ph.D in Information Science and Technology (Osaka University) |
| Academic Societies | IEICE, IPSJ, IEEE, IEEE Computer Society |
| junya@imc Please append ".tut.ac.jp" to the end of the address above. |
|
| Laboratory website URL | https://dsl.cs.tut.ac.jp |
| Researcher information URL(researchmap) | Researcher information |
Research
My research interest includes fault tolerance on distributed systems. Especially, distributed consensus algorithms used for Byzantine fault tolerance, and utilizing virtualization technology such as cloud infrastructure to realize elastic and efficient replication.
Theme1:Byzantine Fault-Tolerance
Overview
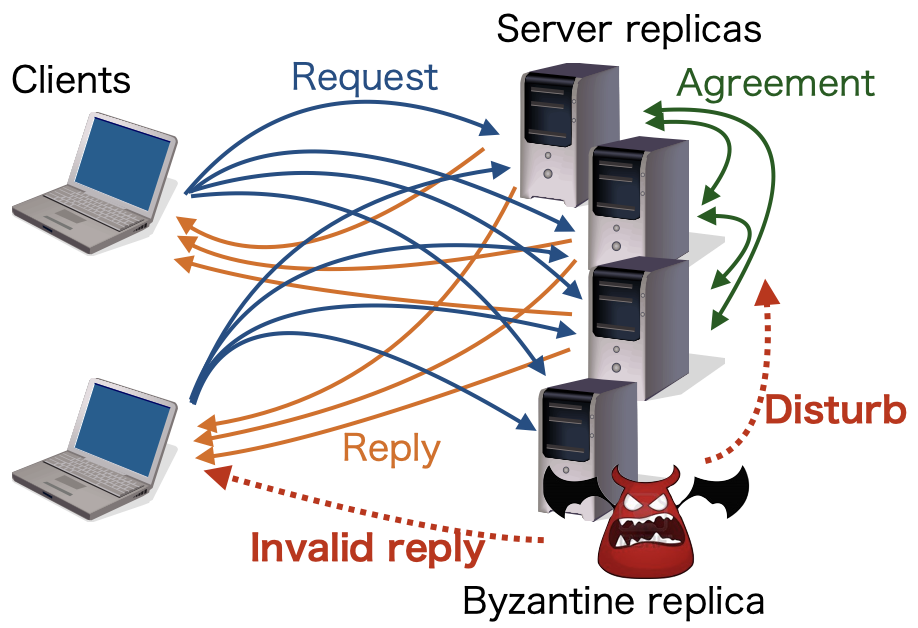
A failed node in a distributed system may behave unexpectedly. Also, if a malicious attacker takes over a node, it may interfere with the processing of other nodes. Such kinds of behavior are modeled as a Byzantine failure. Byzantine Fault Tolerance is known as a replication technology that allows the entire distributed system to continue providing a service even if some nodes are Byzantine. This technology is widely used as a core technology for blockchain (distributed ledger) and distributed databases. In this laboratory, we are conducting research on various technologies to realize more effective Byzantine Fault Tolerance, especially for geo-wide replication utilizing public cloud services.
Selected publications and works
T. Chiba, R. Ohmura and J. Nakamura: “A State Transfer Method That Adapts to Network Bandwidth Variations in Geographic State Machine Replication”, Proceedings of the 9th International Symposium on Computing and Networking (CANDAR), pp. 88–94 (2021).
S. Numakura, J. Nakamura and R. Ohmura: “Evaluation and Ranking of Replica Deployments in Geographic State Machine Replication”, Proceedings of the 38th International Symposium on Reliable Distributed Systems Workshops (SRDSW), pp. 37–42 (2019).
J. Nakamura, T. Araragi, S. Masuyama and T. Masuzawa: “Efficient Randomized Byzantine Fault-Tolerant Replication based on Special Valued Coin Tossing”, IEICE Transactions on Information and Systems, E97-D, 2, pp. 231–244 (2014).
Keywords
Theme2:Machine Learning-based Network Intrusion Detection System
Overview
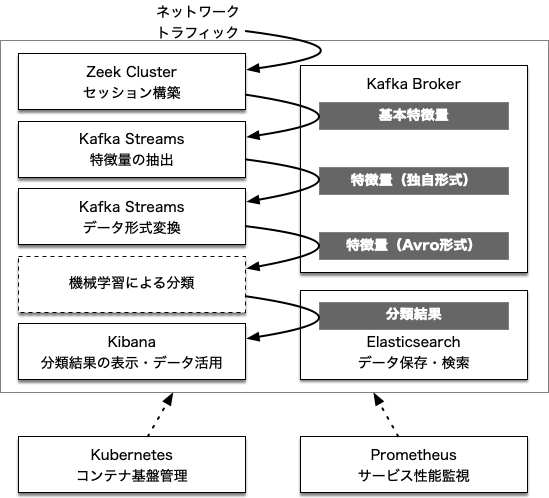
Intrusion attacks on servers over the network are increasing every year. Network intrusion detection systems are widely used to detect and block such attacks. However, many systems use pattern files to detect attacks and cannot handle new types of attacks. To solve this problem, research on intrusion detection systems using machine learning is advancing. In this laboratory, we proposed a distributed processing framework called MLNIDS to realize an intrusion detection system using machine learning. We will verify and improve the practicality of this framework from various viewpoints such as detection rate, processing performance, and stability of long-term operation.
Selected publications and works
多田, 中村, 大村, 小林:“機械学習ベースNIDS構築のための分散処理フレームワーク”, 情報処理学会論 文誌, 60, 9, pp. 1448–1465 (2019).
Keywords
Theme3:Theoretical Analysis of Cooperative Behavior by Autonomous Mobile Robots
Overview
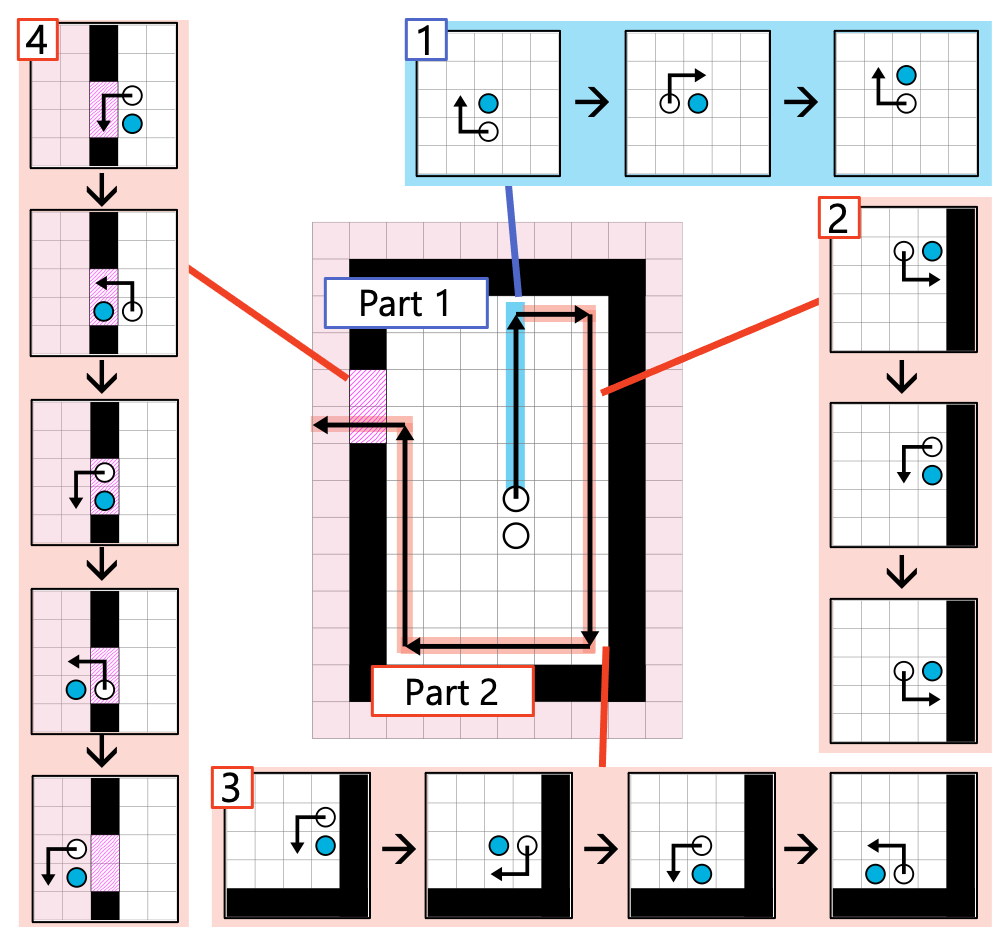
Autonomous mobile robot attracts much attention as a new distributed system implementation. A mobile robot moves autonomously in an environment and collects information. Although each autonomous mobile robot has limited functions, multiple robots can exchange information collected individually and perform advanced tasks cooperatively. From the viewpoint of theoretical computer science, we aim to clarify the functions and complexities of mobile robots required to solve various tasks. The robot model has many variations, such as the presence or absence of memory and communication functions and the definition of fields (continuous and discrete planes).
Selected publications and works
J. Nakamura, S. Kamei and Y. Yamauchi: “Evacuation from various types of finite two-dimensional square grid fields by a metamorphic robotic system”, Concurrency and Computation: Practice and Experience, p. e6628 (2021).
Y. Sudo, M. Shibata, J. Nakamura, Y. Kim and T. Masuzawa: “Self-stabilizing Population Protocols with Global Knowledge”, IEEE Transactions on Parallel and Distributed Systems, 32, 12, pp. 3011–3023 (2021).
J. Hirose, J. Nakamura, F. Ooshita and M. Inoue: “Weakly Byzantine Gathering with a strong team”, IEICE Transactions on Information and Systems, E105-D, 3, pp.451-555 (2022).
Keywords
Title of class
Introduction to Information and Communication Technology
Others (Awards, Committees, Board members)
2021年11月 Outstanding Paper Award. The Ninth International Symposium on Computing and Networking (CANDAR'21).
2021年9月 優秀研究賞. 第17回情報科学ワークショップ.
2020年11月 Outstanding Paper Award. The Eighth International Symposium on Computing and Networking (CANDAR'20).