
Fukumura, Naohiro

| Affiliation | Department of Computer Science and Engineering |
|---|---|
| Title | Professor |
| Fields of Research | Computational Neuroscience |
| Degree | Doctor of Engineering (Toyohashi University of Technology) |
| Academic Societies | The Institute of Electronics, Information and Communication Engineers / Japan Neural Network Society / Robotics Society of Japan |
| fukumura@cs Please append ".tut.ac.jp" to the end of the address above. |
|
| Laboratory website URL | http://www.bmcs.cs.tut.ac.jp |
| Researcher information URL(researchmap) | Researcher information |
Research
Humans integrate many different kinds of information from many sensory organs and extract useful information to make an adequate motion. In order to understand such a human intelligent system, computational models of the sensory-motor transformation system are built based on psychophysical experiments and some knowledge from physiology. And we develop an intelligent system using these models.
Theme1:Computational Research about Human Voluntary Arm Movements
Overview
 Fig.1 Measurement system for human arm movements
Fig.1 Measurement system for human arm movementsHumans can executes various dexterous movements. This process includes extracting important information for the movement from environment, selecting an adequate movement of limbs and body, and controlling many muscles for the movement. We focus on upper limb movements like a reaching movement or a grasping movement. We measure and analysis human arm and hand movements under various conditions and construct computational models of such human movements to investigate the information process of the upper limb movements.
[publications]
Fukuda,H., Kakutani, N., Fukumura, N., and Uno,Y., “A Neural Network Model for Planning Force and Posture in Three-digit Object Holding,” Proceedings of International Joint Conference on Neural Networks, pp.1308-1313 2007
Fukumura, N., Otane, S., Uno, Y., and Suzuki, R., “A Neural Network Model for Extracting Correlated Information in Sensory Integration,” Proceedings of International Conference on Neural Information Processing, Vol.2, pp.873-876 1998
Keywords
Theme2:Research about Human Motor Learning
Overview
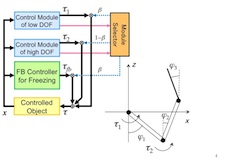 Fig.2 A Learning model of many degrees of freedom system using module structure to control an inverted pendulum by a human arm.
Fig.2 A Learning model of many degrees of freedom system using module structure to control an inverted pendulum by a human arm.One of the essential reasons why humans are able to execute dexterous movements is a flexible motor learning ability. We can learn new movements under the various conditions. One of the motor learning methods is a reinforcement learning method that humans learn by oneself through a trial and error. Another method is called an imitation learning that humans imitate a movement of other expert of the task. We investigate the principle of the motor learning by measuring and analyzing the change of the movement patterns on the process of such learning schemes. Moreover, we verify such motor learning schemes by implementing to some learning motor tasks by a computer simulation.
[publication]
Ohama, Y., Fukumura, N., and Uno, Y., “A Simplified Forward-Propagation Learning Rule Applied to Adaptive Closed-Loop Control,” Proceedings of International Conference on Artificial Neural Networks),pp.437-443 2005
Fukumura, N., Wakaki, K., and Uno,Y., “A Modular Structure of Auto-encoder for the Integration of Different Kinds of Information”, Proceedings of 1st International Conference on Natural Computation, pp.313-321 2005
Keywords
Title of class
Engineering and Science Laboratory / Control Engineering / Bio-physical Information Systems