
ここからコンテンツです。
Electronics Integrated to the Muscle via 'Kirigami'
Donut-shaped kirigami device enabling accurate and robust signal acquisition from the muscle By Takeshi Kawano
A research team lead by Associate Professor Takeshi Kawano from the Department of Electrical and Electronic Information Engineering and the Electronics-Inspired Interdisciplinary Research Institute (EIIRIS) at Toyohashi University of Technology (TUT) has developed a donut-shaped kirigami device for electromyography (EMG) recordings. The proposed device reduces device displacement on a large deformable muscle surface. Accurate and robust EMG recordings offer EMG signal-based human–machine interfaces which allow prosthesis control for amputees. The results of this research were published in an issue of Advanced Healthcare Materials on December 5, 2019. The article also appeared on the inside back cover.
An accurate and robust EMG signal recording is necessary in EMG signal-based human–machine interfaces to allow prosthesis control for amputees using their residual muscle. In 2017, this research team previously proposed an electrode device using the kirigami structure for the intimate integration of the electronic device and biological tissues. (Y. Morikawa et al., 10.1002/adhm.201701100).
The remarkable potential of the kirigami structure stems from its high stretchability, including its high strain ratio and the small force required for stretching the device. The kirigami structure can be stretched with a low strain force and its mechanical characteristics are similar to soft biological tissues, such as in the brain and muscles. However, it is challenging to obtain an accurate and robust bio-signal recording without displacement of the electrode. Device displacement occurs when the kirigami device is applied to biological tissues, such as the heart and muscles, which undergo large deformation.
A research team lead by Associate Professor Takeshi Kawano from TUT’s Department of Electrical and Electronic Information Engineering and EIIRIS has developed a donut-shaped kirigami device for EMG recordings to solve the issue of device displacement during muscle deformation.
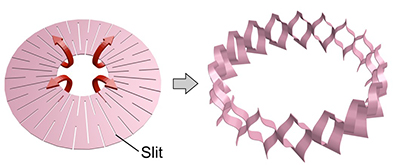
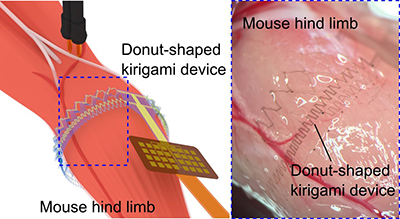
The donut-shaped kirigami structure is able to transform from a 2D donut shape to a 3D cylindrical shape. The cylindrical shape is suitable for numerous spherically or columnar-shaped deformable biological tissues (e.g. upper limb, lower limb, finger, abdomen, and heart). The donut-shaped kirigami device carries out the fixation mechanism to the target tissues and reduces the device displacement during tissue deformation with minimized stress to the biological tissue. The recording capability of the proposed device was confirmed through EMG signal recording from the hind limb of a mouse, thus raising the prospect of using the device for an EMG-based human-machine-interface in the future.
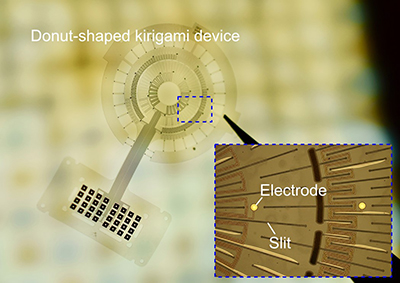
"The first demonstration using our conventional sheet-shaped kirigami device could not follow the deformation of a beating heart. We discussed the device structure, which enables the device to follow deformable tissues. In the preliminary experiment, we used a paper, which was patterned into the proposed donut-shape of the kirigami by the box cutter, and we demonstrated its stretchable and deformable capabilities for the muscle. However, it was uncertain whether the micro-scale donut-kirigami device would show these device properties or not. We explored them through fabricating the device by using the microfabrication process and device characterizations, and were able to confirm that the fabricated device exhibited the expected deformation beyond expectations," explains the first author of the article, Ph.D. candidate Yusuke Morikawa.
The donut-shaped kirigami device still needs further improvements in terms of durability and the dense array of the microelectrodes. Moreover, the influence of the device implantations on the biological tissues when used for a long period still remains to be clarified. However, it is expected that the proposed device will be applicable to an EMG based human-machine-interface and so contribute to the improvement of the quality of life of amputees.
This work was supported by Grants-in-Aid for Scientific Research (B) (No. 17H03250, No. 16H05434), for Young Scientists (A) (No. 26709024), on Innovative Areas (Research in a proposed research area) (15H05917), and Strategic Advancement of Multi-Purpose Ultra-Human Robot and Artificial Intelligence Technologies program from NEDO. Y.M. was supported by the Leading Graduate School Program R03 of MEXT. R.N. was supported by Takeda Science Foundation. K.K. was supported by Toyota Physical & Chemical Research Institute Scholars.
Reference
Yusuke Morikawa, Shota Yamagiwa, Hirohito Sawahata, Rika Numano, Kowa Koida, and Takeshi Kawano. (2019). "Donut‐Shaped Stretchable Kirigami: Enabling Electronics to Integrate with the Deformable Muscle." Advanced Healthcare Materials, 10.1002/adhm.201900939.
https://onlinelibrary.wiley.com/doi/abs/10.1002/adhm.201970092
筋肉に一体化できる 'Kirigami' エレクトロニクス
義手やロボットアームを制御するヒューマン・マシン・インタフェース技術への応用に向けてBy 河野 剛士
豊橋技術科学大学電気・電子情報工学系の河野剛士准教授とエレクトロニクス先端融合研究所の研究チームは、ドーナツ型の切り紙構造を用いた伸縮性筋電位計測用電極を開発しました。本電極では従来の切り紙型神経電極の課題であった、筋肉などの変形する生体組織からの信号を計測する際の電極の位置ずれを低減しました。これにより筋肉からの詳細で安定した信号計測が可能となり、将来的な切断患者の残存筋を用いた義手やロボットアームを制御する技術(ヒューマン・マシン・インタフェース)への応用が期待されます。
筋肉の活動は脳や脊髄から伝えられた電気信号により制御され、その信号は筋電図と呼ばれます。事故などによる切断患者では、切断された部位の機能を失いますが、切断部には筋肉が残されています。この残された筋肉である残存筋を用いて、その電気的な活動を読み取ることで義手などを動かし、失われた機能を回復する技術の開発が行われています。
本研究チームが2017年に開発した切り紙構造を用いた非常に高い伸縮性を持つ神経電極は、マウスの脳や心臓からの信号計測の可能性を示しました(Morikawa et al., 2017 10.1002/adhm.201701100)。この切り紙構造による高い伸縮性は生体組織の持つ柔らかさに近く、一般的に用いられる柔軟性材料やゴムによる柔軟性や伸縮性を持った電極に対して生体へ与える負担を軽減します。しかし、これまでの切り紙構造を用いた電極では、大きな変形を示す生体組織(例えば心臓や筋肉など)に対して、電極の位置ずれやまた電極自身が組織から剥がれる問題がありました。
これらの問題を解決するため、研究チームは新たに円周状の“ドーナツ型”の切り紙構造を提案し、筋肉からの安定的で正確な筋電位の計測を可能とする伸縮性電極を開発しました。
ドーナツ型の切り紙構造は、先ず平面的なドーナツ型のフィルムとして製作され、立体的な円筒形状へと変形させることができます。この伸縮性を持った円筒形状のフィルム電極は生体の円形状を持った様々な生体組織(腕や脚、指、腹部、心臓などの臓器)へ、電極デバイスの高い密着性を生体の動きを阻害することなく実現する事ができます。
本デバイスを用いた実験ではマウスの後脚の筋肉より、異なる脚の動きに対応する筋電位の識別が可能であることも確認されました。これらの結果は、切断患者の残存筋を用いて義手やロボットアームを制御するヒューマン・マシン・インタフェース技術への応用が期待されます。
「以前に開発したシート型の切り紙構造を用いた電極では、マウスの心臓を対象にした実験を行ったときに、各々の電極が十分に心臓の動きに追従できませんでした。この様子を見て、心臓のような大きな変形を示す生体組織に適した電極とはどのようなものかと考えたところからドーナツ型の切り紙構造が生まれました。電極の試作では、設計した切り紙構造を紙に印刷してカッターナイフで切って確認しました。実際に半導体微細加工技術を用いて製作するマイクロスケールの小さなドーナツ型デバイスが、紙で確認した変形と同様に変形するのか半信半疑でしたが、結果として製作したデバイスは予想した通りの変形を示しました。」と、筆頭著者である博士後期課程の森川雄介は説明します。
今回提案したドーナツ型切り紙構造を利用した伸縮性電極には、機械的な強度や信号の解像度の点でまだ課題があります。また、生体組織への埋め込みにより、生体への長期的な影響を確認すると共に、計測された筋肉の活動から、実際にロボット等の制御を行いたいと考えています。今後は、切断患者の生活の向上に役立つデバイスの実現を目指しています。
Researcher Profile

| Name | Takeshi Kawano |
|---|---|
| Affiliation | Department of Electrical and Electronic Information Engineering |
| Title | Associate Professor |
| Fields of Research | Micro/Nano Devices, Neural Interface Devices |
ここでコンテンツ終わりです。