
ここからコンテンツです。
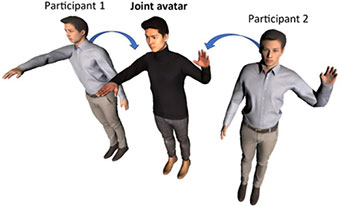
Virtual co-embodiment of a joint body with left and right limbs controlled by two people
Knowing the intention behind limb movements of a partner increases senses of ownership and agency towards that limb during virtual co-embodimentHarin Hapuarachchi
What factors influence the embodiment felt towards parts of our bodies controlled by others? Using a new "joint avatar" whose left and right limbs are controlled by two people simultaneously, researchers have revealed that the visual information necessary to predict the partner’s intentions behind limb movements can significantly enhance the sense of embodiment towards partner-controlled limbs during virtual co-embodiment. This finding may contribute to enhancing the sense of embodiment towards autonomous prosthetic limbs.
Virtual reality can enable us to be co-embodied with others in a single avatar to collaboratively perform various tasks. A previously published study about a "shared avatar" that was moved by the average movements of two individuals has shown that the movements of the shared avatar were smoother and straighter than the movements of the individuals (Hagiwara et al., iScience 2020). Thus, such avatars are more suitable for precision tasks. However, when it comes to users with disabilities in certain limbs, getting them partners to fully control the corresponding limbs of their virtual avatars can be an option.
Here, Ph.D. candidate Harin Hapuarachchi and Professor Michiteru Kitazaki from Toyohashi University of Technology developed a "Joint Avatar" whose left and right limbs are fully controlled by two different persons, and investigated the factors affecting embodiment towards limbs controlled by a partner.
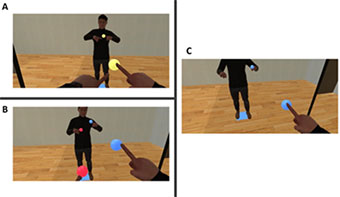
A. A common target.
B. Different visible targets.
C. Different invisible target.
Researchers measured the senses of agency and ownership towards the two arms of the joint avatar and changes in skin conductance levels in response to visual stimuli threatening the two virtual arms. Participants in the experiment were paired and asked to collaboratively reach one or two target objects appearing at random positions with the two arms of the joint avatar. The sense of agency, ownership, and skin conductance of participants was significantly higher towards the virtual arm under their control compared to the virtual arm controlled by their partner. Furthermore, the senses of agency and ownership towards the arm controlled by the partner were significantly higher when the participants shared a common intention to reach a single target with both hands or when they were allowed to see their partner’s target while reaching different targets with the two virtual hands, compared to when the partner’s target was invisible (while having two different targets).
These results show that while embodiment towards partner-controlled limbs is lower compared to limbs under one’s own control, visual information necessary to predict the partner’s intentions can positively affect embodiment towards partner-controlled limbs during virtual co-embodiment.
The lead author, Harin Hapuarachchi, said, "The Joint avatar concept can provide a research platform for virtually studying how different factors – such as various haptic, visual, and auditory feedbacks – affect embodiment towards autonomous prosthetic limbs in the future. Amputees wearing smart prosthetics may feel some discomfort when those prosthetic limbs move autonomously without their intention. However, our findings suggest that if the target of the prosthetic limb or the intention behind movements is conveyed to the user through visual cues, they may feel less discomfort related to lack of embodiment."
Furthermore, Professor Michiteru Kitazaki added, "The senses of ownership and agency towards the non-controlled arm were still weak and the physiological responses were not significantly different among the target conditions. Thus, our findings are limited, and the research is ongoing."
The concept of this joint avatar can be applied to combining the strengths of two or more people to increase overall efficiency in multi-tasking, and may also contribute to designing autonomous prosthetic limbs with a higher sense of embodiment in the future.
This study was published in Scientific Reports on July 26, 2022.
This research was supported by JST ERATO Grant Number JPMJER1701 (Inami JIZAI Body Project), and JSPS KAKENHI Grant Number JP20H04489.
Reference
Hapuarachchi H., and Kitazaki, M. (2022). Knowing the intention behind limb movements of a partner increases embodiment towards the limb of joint avatar, Scientific Reports,
https://doi.org/10.1038/s41598-022-15932-x
Hagiwara, T., Ganesh, G., Sugimoto, M., Inami, M., and Kitazaki, M. (2020). Individuals prioritize the reach straightness and hand jerk of a shared avatar over their own. iScience,
https://doi.org/10.1016/j.isci.2020.101732
左右の腕を2人が独立に操作するバーチャルアバターの身体性
他者が操作する腕の動きの意図を知ることがその腕の自己身体感を高めるハリン ハプアーラッチ
バーチャルリアリティを用いて、2人のユーザーが1つのアバターの左右の半身を操作する結合身体アバターを開発しました。しかし、他者が操作する身体部位をどのようにしたら自己身体と感じられるのでしょうか?実験により、他者が操作する腕に対する身体性は、自分が制御する腕に比べて低いものの、他者の意図を予測する視覚情報があれば、他者が操作する腕に対する自己身体感を促進できることを明らかにしました。将来的には、自律駆動する義肢に感じる違和感を減らす設計にも貢献することが期待できます。
人は1つの身体を持ちます。しかし、バーチャルリアリティでは、2人の異なる人が1つのアバターを身体化することができます。これは、離れた場所にいる人が共同作業を行う新しい方法を提供します。これまで、2人の動きを平均化することで動きを制御する共有身体アバターが開発されています(Hagiwara et al, iScience 2020)。共有身体アバターの動きは、個々人の動きよりも直線的で滑らかであるため、精密な作業に向いています。しかし、アバターの体の一部を別の人が操作する方法については、これまで研究されていません。
そこで、豊橋技術科学大学の博士課程学生Harin Hapuarachchiと北崎充晃教授は、左右の半身を別々の人が操作する結合身体アバターを開発し、パートナーである他者が操作する腕の身体性に影響を与える要因を研究しました。
研究グループは、結合身体アバターの別々の人が操作する2本の腕に対する行為主体性と身体所有感を測定し、アバターの腕にナイフが刺さるときの皮膚コンダクタンス反応を測定しました。実験参加者はペアになり、ランダムな位置に出現する目標物体に手で到達するよう求められました。その結果、行為主体性、身体所有感、皮膚コンダクタンス反応は、他者が操作する腕と比較して自分が操作する腕に対して有意に高くなりました。さらに、二人が別々に操作する両手で1つの目標物に到達するという共通の意図がある場合や他者の目標物を見ることができる場合には、他者の目標物が見えない場合に比べ、他者が操作する腕に対する行為主体性や身体所有感は有意に高くなりました。
これらの結果は、他者に制御された腕に対する自己身体性は自分が制御する腕に比べて低いものの、他者の意図を予測することを可能とする視覚情報が他者に制御された腕に対する自己身体感を改善することを示しています。
筆頭著者のHarin Hapuarachchiは、「結合身体アバターは、2人以上の能力を組み合わせることで、マルチタスクの効率化や障害者支援に活用できる可能性があります。さらに、将来的には自律駆動型義肢の研究プラットフォームにもなりえます。たとえば、義肢がユーザーの意思に関係なく自動的に動くと人は違和感を覚えます。しかし、今回の研究結果は、義肢の目標や意図がユーザーに共有・視認されれば、ユーザーはより違和感を感じなくなることを示唆しています」と述べています。
北崎充晃教授は、自分が制御していない腕に対する所有感や行為主体感は他者の意図が伝わる場合でも、自分が操作する場合に比べるとかなり弱いことを指摘しています。生理反応にも、意図や目標の共有条件による有意な差は見られず、今回の成果は未だ限定的であり、研究は現在も進行中であるとのことです。
結合身体アバターは、2人以上の人がそれぞれの得意な身体部位や技能を組み合わせるという新しいタイプの共同作業方法を提供します。また、将来的には、より自然に感じられる自律駆動型義肢の設計にも貢献することが期待されます。
本研究は、2022年7月26日付のScientific Reportsに掲載されました。
本成果は、科学技術振興機構(JST) 戦略的創造研究推進事業 ERATO「稲見自在化身体プロジェクト」(課題番号:JPMJER1701)および、JSPS科研費(課題番号:JP20H04489)によって得られたものです。
Researcher Profile

| Name | Harin Hapuarachchi |
|---|---|
| Affiliation | Department of Computer Science and Engineering |
| Title | Doctor Course Student / TUT-DC Fellowship |
| Fields of Research | Humanities & Social Sciences / Experimental Psychology |
| Graduated KOSEN | National Institute of Technology, Toyama College |
ここでコンテンツ終わりです。