
ここからコンテンツです。
Unveiling the world’s smallest and most powerful micro motors
Realization of practical torque for a one cubic millimeter ultrasonic motor By Tomoaki Mashimo
Piezoelectric ultrasonic motors have two significant advantages, namely their high energy density and their simple structure, which both contribute to their miniaturization. A prototype micro ultrasonic motor using a stator with a volume of approximately one cubic millimeter was built. The experiments have shown that the prototype motor generates a torque of more than 10 μNm with a one cubic millimeter stator. This novel motor is now the smallest micro ultrasonic motor that has been developed with a practical torque.
Micro actuators are needed for numerous applications, ranging from mobile and wearable devices to minimally invasive medical devices. However, the limitations associated with their fabrication have restricted their deployment at the one-millimeter scale. The most common electromagnetic motors require the miniaturization of many complicated components such as coils, magnets, and bearings, and exhibit severe torque dissipation due to the scaling. Electrostatic motors enable excellent scalability by using micro-electromechanical systems (MEMS) technology, but their weak driving force has so far limited their further development.
Piezoelectric ultrasonic motors are expected to become high-performance micromotors because of their high torque density and simple components. The smallest existing ultrasonic motor reported to date has a metallic component with a diameter of 0.25 mm and a length of 1 mm. However, its total size, including the preload mechanism, amounts to 2-3 mm, and its torque value is too small (47 nNm) for use as an actuator in many applications.
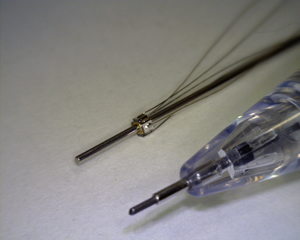
Tomoaki Mashimo , of the Electronics-Inspired Interdisciplinary Research Institute (EIIRIS), Toyohashi University of Technology, has been developing a micro ultrasonic motor with a one cubic millimeter stator, as shown in Fig. 1, which is also one of the smallest ultrasonic motors ever built. The stator, which comprises a metallic cube with a through-hole and plate-piezoelectric elements adhered to its sides, can be scaled down without requiring any special machining or assembly methods. The prototype micro ultrasonic motor achieved a practical torque of 10 μNm (If the pulley has a radius of 1 mm, the motor can lift a 1-g weight) and an angular velocity of 3000 rpm at approximately 70 Vp-p. This torque value is 200 times larger than that of existing micro motors, and is very practical for rotating small objects such as small sensors and mechanical parts.
According to Mashimo, “The simplicity of the stator structure enabled the miniaturization without having to use any special machining process. This prototype stator is much simpler than those of other existing ultrasonic motors.”
The next goal of this research is to improve the values of performance parameters for practical applications, such as energy efficiency and lifetime. In future, the proposed micro motors may actuate micro forceps embedded in endoscopes for safe and less-invasive operations.
Reference
- Tomoaki Mashimo, Asia’s largest tradeshow & conference dedicated to the design & manufacture of medical devices (MEDTEC Japan 2015), Apr. 22-24, 2015, Tokyo.
Researcher Profile

| Name | Tomoaki Mashimo |
|---|---|
| Affiliation | Electronics-Inspired Interdisciplinary Research Institute(EIIRIS) |
| Title | Tenure Track Assistant Professor |
| Fields of Research | Actuator, Mechatronics, Robotics, Ultrasonic |
ここでコンテンツ終わりです。