
ここからコンテンツです。
Tackle Rat-run Traffic in Residential Areas in Collaboration with Road Administrators
Implementing traffic safety management methods using traffic big data By Kojiro Matsuo
Using a type of traffic big data, namely, probe vehicle data, we have developed a method capable of capturing the state of rat-run traffic in residential areas in qualitative, wide-ranging, and efficient ways. We have called this new technique GRATT, which stands for Grasping RAT-run Traffic. We are currently working on a traffic safety management project in collaboration with the road administrator of Toyohashi City (Road Maintenance Section, Department of Construction) with the aim of its implementation contributing to traffic safety in the area.
Compared to Western countries, Japan has a high rate of car accidents involving pedestrians and bicycles traveling in residential areas. Creating a safe community street space for pedestrians and cyclists is one societal issue we are currently facing in Japan. The importance of both lowering vehicle speeds in residential areas and limiting transit traffic that does not necessarily need to use such areas, or so-called “rat-run” traffic, is now recognized as an issue both domestically and overseas.
In order to implement effective rat-run traffic control measures, it is necessary to properly understand what kind of state the traffic is in. However, conventional surveying methods require a lot of time and manpower to qualitatively assess the state of rat-run traffic.
By using probe vehicle data, which is classified as one type of traffic big data, our urban & transportation systems laboratory has developed the technique for Grasping RAT-run traffic (GRATT), a method capable of grasping the state of rat-run traffic in residential areas in qualitative, wide-ranging, and efficient ways. Probe vehicle data is data that records the temporal position (longitude and latitude), travel state (speed, acceleration, direction), and other information of a vehicle as it travels. In the last few years, the amount of data being gathered on ordinary vehicles (limited to vehicles with drivers who agree to data collection) has increased due to the use of ETC 2.0, car navigation systems, smartphones, and other devices. With conventional field surveying methods, it is only possible to observe a part of each trip (movement from origin to destination).However, probe vehicle data can track and monitor the whole trip trajectory (Fig. 2). This particular feature of probe vehicle data is what inspired us to develop GRATT.
At present, we are conducting a traffic safety management project in collaboration with the road administrator of Toyohashi City (Road Maintenance section, Department of Construction) with the aim of implementing GRATT and improving traffic safety in the area. Introducing GRATT will help the road administrator more effectively and efficiently achieve the following PDCA cycle for traffic safety management (Fig. 3).
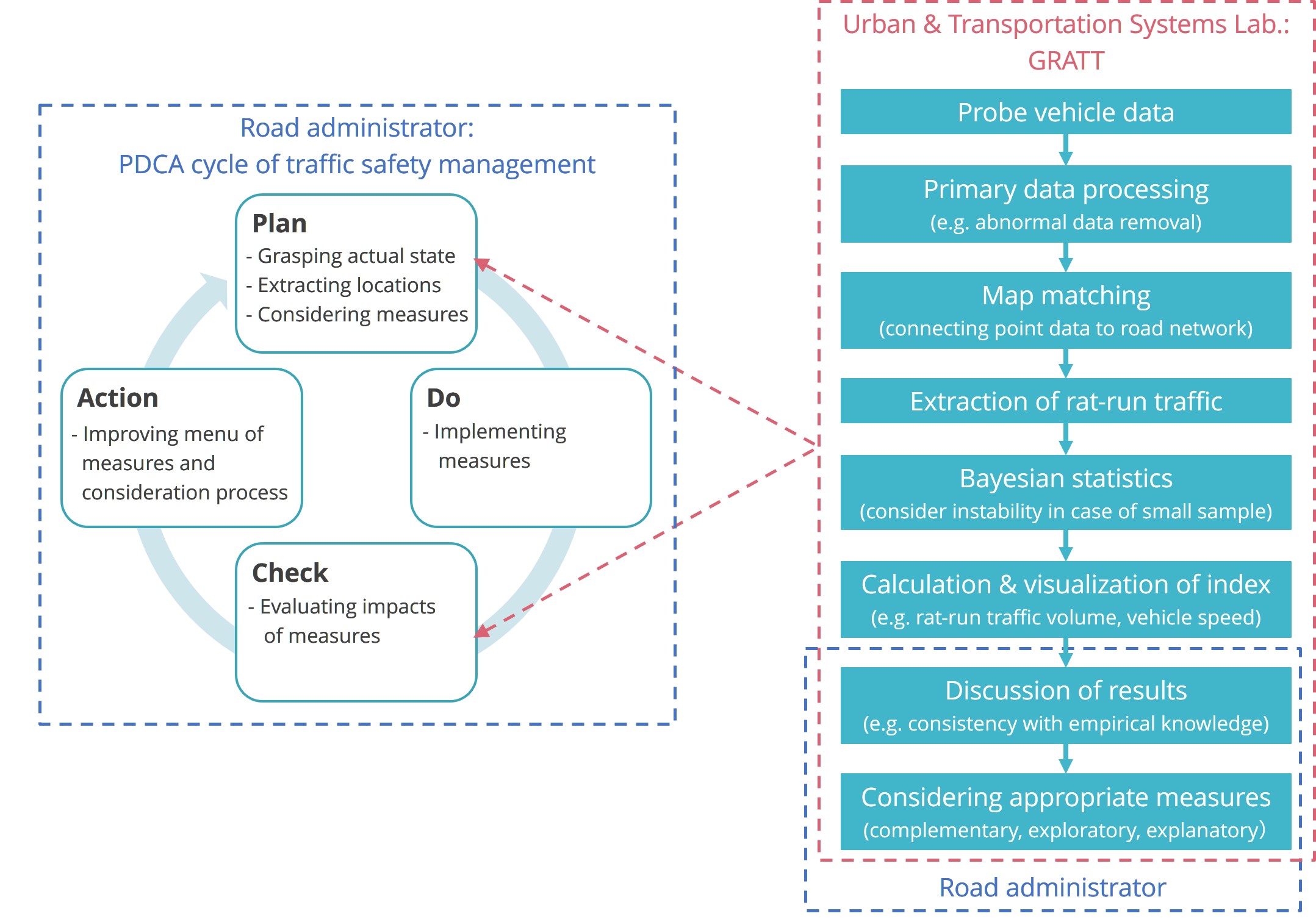
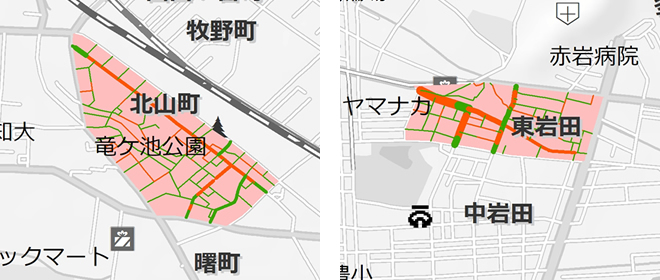
GRATT first extracts data on rat-run traffic in residential areas from probe vehicle data that has undergone primary data processing and map-matching processing. It then calculates an evaluation index (amount of rat-run traffic, rat-run usage rate, vehicle speed, etc.) for each segment of the road, and then visualizes this data using a geographic information system (GIS). The results are then discussed between our lab and the road administrator, after which we consider appropriate measures for areas in which priority measures are to be taken. At this step, we suppose 1. “Complementary use” for quantitatively assessing areas that the road administrator has already determined as candidate areas, 2. “Exploratory use” for extracting prioritized areas from the data, and 3. “Explanatory use” for communicating to local citizens the significance and effect of implementing the measures in question. The measures will then be actually implemented, and their effectiveness will be evaluated by GRATT through comparisons between the state of traffic before and after the measures were carried out.
Based on the fact that data analysis results cannot tell us everything, we place importance on sufficiently discussing GRATT results in terms of whether they match the experience and knowledge of the road administrator, as well as the intent of the measures. We believe that this way of analyzing results is very important, especially when applying engineering technology to the planning processes of governments and other institutions.
In addition to GRATT, our lab is also conducting research on various other traffic safety management methods, including traffic accident risk evaluation systems for small intersections with no traffic lights, and limiting vehicle speeds with Intelligent Speed Adaptation (ISA), with the aim of implementing these projects sometime in the future.
Our research on rat-run traffic issues on residential areas has been made possible thanks to MEXT’s Grant-in-Aid for Scientific Research #16K18168. Our project in collaboration with the road administrator of Toyohashi City was also made possible thanks to financial aid from Toyohashi City’s Innovation Support Project (local problem-solving field).
Reference
Yuki Sakuragi, Kojiro Matsuo, and Yasuhiro Hirobata (2016). Extraction and analyses of rat-run traffic based on floating car data, Proceedings of 23th World Congress on Intelligent Transport Systems.
GRATTで道路管理者と連携して生活道路抜け道交通対策に挑む
交通ビッグデータを活用した交通安全マネジメント手法の社会実装By 松尾 幸二郎
交通ビッグデータの1つとされる自動車プローブデータを活用して、生活道路抜け道交通の実態を定量的・広域的・効率的に把握する手法:Grasping RAT-run traffic Technique (GRATT) を開発し、社会実装として、地域の交通安全に貢献するべく、豊橋市の道路管理者(建設部道路維持課)と連携した交通安全マネジメントプロジェクトを行っています。
日本は欧米諸国と比較して、生活道路における歩行中・自転車乗用中の事故が多く、歩行者・自転車利用者にとって安全な生活道路空間の創出が社会的課題の1つとなっています。生活道路においては、自動車速度の抑制はもちろんのこと、必ずしも生活道路を使う必要のない通過交通、いわゆる「抜け道」交通を抑制することの重要性が国内外で認知されています。
効果的な抜け道交通抑止対策を実施するためには、その状況を適切に把握することが必要不可欠です。しかしながら、従来の調査手法では、抜け道交通の実態を定量的に把握するために非常に多くの時間的・人的コストが必要な状況にありました。
我々の都市・交通システム研究室は、交通ビッグデータの1つとされる自動車プローブデータを活用して、生活道路抜け道交通の実態を定量的・広域的・効率的に把握する手法:Grasping RAT-run traffic Technique (GRATT)を開発しました。自動車プローブデータとは、走行している自動車が自車の時々刻々の位置(緯度・経度)や走行状態(速度、加速度、方向)などを記録したもので、近年では、ETC2.0、カーナビ、スマートフォンなどを通じて一般の自動車(保有者同意済みに限る)のデータの蓄積が進んでいます。従来の現地調査ではトリップ(出発地から目的地までの移動)を局所的にしか観察できないのに対し、自動車プローブデータではトリップ全体を把握することができる (Fig. 2) という特性から着想を得て、GRATTの開発に至りました。
現在、GRATTを社会実装し地域の交通安全に貢献するべく、豊橋市の道路管理者(建設部道路維持課)と連携した交通安全マネジメントプロジェクトを行っています。GRATTを導入することにより、道路管理者が交通安全マネジメントのPDCAサイクルを効果的かつ効率的に回すことに貢献します (Fig. 3)。
GRATTでは、まず1次データ処理およびマップマッチング処理を行った自動車プローブデータから生活道路抜け道交通を抽出し、その道路区間別の評価指標(抜け道交通量、抜け道利用率、走行速度など)を算出、GIS(地理情報システム)により可視化します。次に、結果について本研究室と道路管理者と合同で考察を行った上で、優先対策実施箇所の抽出・対策の検討を行います。ここでは、①道路管理者が事前に対策候補箇所として挙げている箇所についての状況を定量的に把握するための「補完的活用」、②データから優先対策箇所を抽出する「探索的活用」、③対策実施の意義や効果を市民などに説明するための「説明的活用」などを想定しています。そして実際に対策を実施し、GRATTにより対策事前事後の状況を比較することで対策効果の検証を行います。
GRATTでは、データ分析結果が全てを語るものではないという視座のもと、結果について、道路管理者の経験的知見や対策主旨に整合しているかなどを十分に議論する点を重視しています。この視点は特に行政等の計画プロセスに工学的技術を導入する上で非常に重要であると考えています。
本研究室では、GRATTの他にも、信号のない小規模交差点における交通事故リスク評価シミュレーションや、Intelligent Speed Adaptation (ISA) による自動車速度制御など、様々な交通安全マネジメント手法の研究を行っており、今後はそれらの社会実装に向け取り組んでいきます。
生活道路の抜け道交通問題に関する研究は、文部科学省・日本学術振興会科学研究費#16K18168の補助を受けて実施しています。また、豊橋市道路管理者と連携したプロジェクトは、豊橋市・イノベーション創出等支援事業(地域課題解分野)の補助を受けて実施しています。
Researcher Profile

| Name | Kojiro Matsuo |
|---|---|
| Affiliation | Department of Architecture and Civil Engineering |
| Title | Assistant Professor |
| Fields of Research | Traffic Engineering / Infrastructure Planning |
ここでコンテンツ終わりです。