
ここからコンテンツです。
Sociable Dining Table
Learning from the Wizard to enable a Human-Robot social interaction adaptive to individual preferenceBy Khaoula Youssef
To effectively design robots that leverage available non-expert human scaffolding, we need to understand how humans naturally teach. Ph.D. candidate Khaoula Youssef and her research group in Toyohashi University of Technology demonstrated how we can ecologically extract interaction patterns and integrate an adaptive architecture into robots enabling them to adapt to emerging online human knowledge. The approach consists of two experiments: a human-human experiment (Wizard-of-Oz) to explore how people build a protocol of communication, and a human-robot interaction (HRI) experiment to validate how an actor-critical architecture suggested in the first experiment enabled the adaptation to individual preference.
When robots are supposed to learn a task, much engineering by technical experts goes into determining how the industrial robots should be adjusted to the specific task. However, social robots include those that interact with non programmers. Because human beings are a largely untapped source of knowledge and guidance during the learning process, designing a task-specific designed robot is difficult.
Thus, to effectively design such social robots with relatively natural interfaces that allow anyone including non-programmers (non-experts) to guide the learning process of a robot, understanding how humans naturally teach is important.
Ph.D. candidate of Khaoula Youssef and her research group from the Interaction and Communication Design (ICD) Lab at Toyohashi University of Technology could identify the commonly mirrored patterns and strategies used by humans in a human-human interaction context by conducting a Wizard-of-Oz (WOz) experiment.

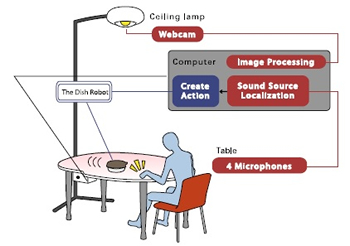
In the experiment, the first human in room (A) knocks on the table to make a robot called Sociable Dining Table (SDT) exhibit certain behavior. These knocking sounds are translated by the second human, the robot’s remote controller located in room (B). The controller does not recognize these as human knocking patterns, while the human ignores the fact that the controller controls the robot using his/her knocking. It was found from the experiment that incrementally people modulated their knocking, which suggests that they understood over time that they needed to use simple commands to make the robot behave according to their intentions (systematized input means systematized output).
Youssef Khaoula said "We could identify specific patterns of interaction based on the WOz experiment. For example, sometimes the controller auto-criticized his choice and changed the robot’s behavior without being stimulated by any knocking (confusion state). The knocker could learn to read this situation and adapt their behavior to implicitly help the controller by composing the previously sent command (remedial knocking pattern). Thus, we decided to use the actor-critic architecture which is a reinforcement-based algorithm."
After implementing the actor-critic architecture, a Human-Robot Interaction (HRI) experiment was conducted to verify whether the human (knocker) could interact with the robot to translate the emerging knocking patterns in the same way as the previous experiment. Here, the robot is autonomous and does not require a controller. The results indicated that the autonomous robot using the actor-critic algorithm could indeed establish a communication protocol when interacting with a non-programmer.
The robot is not designed to be task-specific, but it adapts to the user’s method which may empower the robot and makes the interaction natural. The methodology serves as an inspirational technique that roboticists building robots for non-programmers could follow to build useful and easy to use minimally designed robots imbued with the capability to interact naturally with the human.
This research is supported by Grant-in-Aid for scientific research of KIBAN-B (26280102) from the Japan Society for the Promotion of Science (JSPS).
Reference
Youssef Khaoula, Asano Takahiro, De Silva P. Ravindra S. and Okada Michio (2016). Sociable Dining Table: Meaning Acquisition Exploration in Knock-Based Proto-Communication, International journal of social robotics, 8(1), 67--84. 10.1007/s12369-015-0314-y.
Researcher Profile

| Name | Khaoula Youssef |
|---|---|
| Affiliation | Department of Computer Science and Engineering |
| Title | Ph.D. Candidate |
| Fields of Research | Human-Robot interaction, social bonding, communication grounding, controller modeling |
ここでコンテンツ終わりです。