
ここからコンテンツです。
Prompting appropriate behavior change in drivers with a “little nudge”
The development of a new driving agent based on the ‘Nudge Theory’ By Naoki Ohshima
The Interaction and Communication Design Lab (ICD-LAB), a research group formed from Toyohashi University of Technology’s Department of Computer Science and Engineering and the Electronics-Inspired Interdisciplinary Research Institute (EIIRIS), have developed a new driving agent, 〈NAMIDA0〉, that “applies small nudges with the purpose of modifying a person’s behavior towards a desired outcome”. 〈NAMIDA0〉 uses three agents to create ‘rapport talk (chit-chat)’ and makes it possible for the driver listening to the chat to select the appropriate behavior based on his/her own judgement.
Conversation by traditional driving agents often uses unilateral instructions directed towards the driver, and leaves the driver with the impression that their behavior is being forced by the agent, or imposes a cognitive burden on the driver. A research group from the ICD-LAB led by Lecturer Ohshima in the Department of Computer Science and Engineering at Toyohashi University of Technology developed 〈NAMIDA0〉, a new driving agent based on the Nudge Theory that “applies small nudges with the purpose of modifying a person’s behavior towards a desired outcome”.
The Nudge Theory is a new way of thinking that is gaining attention in the field of behavioral economics pertaining to prompting change in a person’s behavior. The theory that “a small prompt or ‘nudge’ is more effective than ‘nagging’ in guiding a person’s behavior in the right direction” was proposed by the University of Chicago’s Professor Richard H. Thaler, winner of the Nobel Prize in Economics in 2017.

There has been a continuous flow of proposals for unique driving agents both overseas with MIT Media Lab and Volkswagen’s AIDA, as well as domestically with KIROBO Mini (by Toyota Motor Corporation), a small robot that supports communication between the driver and the vehicle, but the ICD-LAB of Toyohashi University of Technology is the first in the world to incorporate Nudge Theory to the communication between drivers and driver agents. This method is designed to lead to the fostering of consideration towards passengers and pedestrians and appropriate driver behavior.
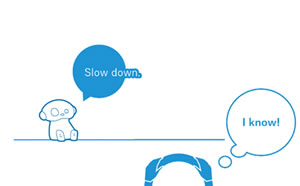
〈NAMIDA0〉, the new driving agent offered by the ICD-LAB, uses three agents to create ‘rapport talk (chit-chat)’ and makes it possible for the driver listening to the chat to select the appropriate behavior based on his/her own judgement. Choosing one’s own behavior without being forced also brings about a sense of satisfaction in choosing that particular behavior.
One of the main features of 〈NAMIDA0〉 is that it provides a calm navigation environment in a format in which is it possible to predict driver behavior without neglecting the interaction with the driver, nor forcing the driver into a particular behavior.
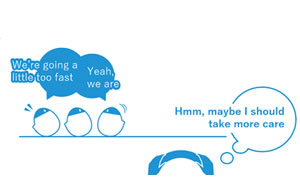
ICD-LAB also conducted testing using a driving simulator and succeeded in showing the usefulness of guidance by rapport talk. As shown in the agent conversation example, by expressing the agent’s preference for a particular route, the driver was nudged towards choosing that direction as if on their own initiative (whereas in fact the driver was being guided towards the path suggested by the agent).
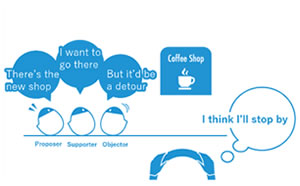
On the other hand, when the agents expressed their separate opinions outside of a conversational context there was no noticeable impact on the driver’s behavior. On the contrary, we discovered that the driver formed a negative impression due to the unfocused input of the agents. This type of guidance technique using rapport talk can therefore lead the driver to behave appropriately.
Driving agent 〈NAMIDA0〉’s interaction technology can be applied to fields such as welfare and nursing, as well as educational support interfaces, and we are planning on developing it further in the future. We plan to further challenge ourselves in future endeavors aimed at the implementation of 〈NAMIDA0〉’s interaction technology in society so that we can provide this driver agent’s unique technology in more familiar everyday living spaces.
References
Momoko Fushiki, Kazuki Ota, Komei Hasegawa, Naoki Ohshima, and Michio Okada (2020) Application of ‘Nudge Theory’ for a Driving Agent “NAMIDA”, Human Interface Society Journal, Vol. 22, NO.4, 443-456.
https://doi.org/10.11184/his.22.4_443 (in Japanese)
For more information on ICD-LAB Activities:
Website:https://www.icd.cs.tut.ac.jp/
Twitter:https://twitter.com/IcdLab
Facebook:https://www.facebook.com/icdlab
Instagram:https://www.instagram.com/icdlab/
“ちょっとした後押し”でドライバーに適切な行動変容をうながす
〈ナッジ理論〉に基づく新たなドライビングエージェントの開発By 大島 直樹
豊橋技術科学大学情報・知能工学系とエレクトロニクス先端融合研究所の研究グループInteraction and Communication Lab.(ICD-LAB)は、“ちょっとした後押しで人の行動を結果的に良い方向に導く”、新たなドライビングエージェント 〈NAMIDA0〉 を開発しました。〈NAMIDA0〉は、3つのエージェントによるラポールトーク(雑談)を形成し、これを傍聴したドライバーが自らの判断によって適切な行動を選択することを可能とします。
従来のドライビングエージェントによる会話では、ドライバーに対する一方的な指示のような形式になりやすく、ドライバーはエージェントから行動を強制されているという印象をもったり、ドライバーに認知的な負担を与えてしまっていました。そこで、豊橋技術科学大学情報・知能工学系の大島准教授らの研究グループ(ICD-LAB)は、“ちょっとした後押しで人の行動を結果的に良い方向に導く” というナッジ理論に基づく、新たなドライビングエージェント 〈NAMIDA0〉を開発しました。
〈ナッジ理論〉とは、人の行動変容をうながす行動経済学の領域で注目されている新しい考え方です。「がみがみ言う ”Nag” よりも、ヒジで軽くつつく ”Nudge” くらいのちょっとした後押しのほうが、結果的に人の行動を良い方向へ導く」 という、2017年ノーベル経済学賞を受賞したRichard H. Thalerシカゴ大学教授が提唱した理論です。
海外では、MIT Media LabとVolkswagenにより提案されたAIDA、国内では、ドライバーとクルマとのコミュニケーションをサポートする小型ロボットKIROBO Mini(トヨタ自動車)など、ユニークなドライビングエージェントの提案が続いていますが、豊橋技術科学大学のICD-LABでは、世界に先駆けて、この〈ナッジ理論〉をドライビングエージェントとドライバーとのコミュニケーションに適用し、実装に向けて取り組んでいます。これは、同乗者や歩行者に対するドライバーの思いやりや、適切な運転行動を引きだすことにつながります。
ICD-LABの提案する新たなドライビングエージェント 〈NAMIDA0〉 では、3つのエージェントによるラポールトーク(雑談)を形成し、これを傍聴したドライバーが自らの判断によって適切な行動を選択することを可能とします。強制されず自身で行動を選択することは、その行動を選択したことに対する納得感にもつながります。
このように 〈NAMIDA0〉 のエージェントの大きな特徴は、ドライバーとの関わりを全く放任するわけでもドライバーに行動を強いるわけでもなく、ドライバーの行動を予測可能な形で、緩やかにナビゲートできる環境を提供できる点です。
また、ICD-LABではドライビングシミュレータを用いた走行実験を実施し、ラポールトークによる誘導の有用性を示すことに成功しました。エージェントの会話例にも示されるように、ある経路に対するエージェントの興味関心をより強く表現することで、ドライバーはそちらの方向へそれとなく舵を切る(エージェントの提示経路に導かれる)ことができました。一方、エージェントの興味関心をバラバラに発散させる表現の場合では、ドライバーの行動変容に目立った影響はなく、むしろ、ドライバーはエージェントが放任的な会話を形成しているとして、ネガティブな印象を持つことが分かりました。このようなラポールトークによる誘導テクニックは、ドライバーの適切な行動を導くことができます。
ドライビングエージェント 〈NAMIDA0〉 のもつインタラクション技術は、福祉介護分野インタフェース、教育支援インタフェースなどの領域にも展開可能であり、今後さらなる発展を予定しています。私たちのより身近な生活空間において、ドライビングエージェント 〈NAMIDA0〉 のもつ独自のインタラクション技術を提供できるよう、社会実装に向けたさまざまな取り組みにも今後挑戦する予定です。
Researcher Profile

| Name | Naoki Ohshima |
|---|---|
| Affiliation | Electronics-Inspired Interdisciplinary Research Institute (EIIRIS) |
| Title | Lecturer |
| Fields of Research | Human-Robot Interaction, Human-Agent Interaction |
| Degree | Ph. D. (Engineering), Toyohashi University of Technology |
| Graduated KOSEN |
National Institute of Technology, Nagano College |
ここでコンテンツ終わりです。