
ここからコンテンツです。
A wall-climbing robot – inspired by the soft body of a leech
180 degree rotation from one side of the wall to the otherBy Tomoaki Mashimo
A research team led by Associate Professor Tomoaki Mashimo of the Department of Mechanical Engineering at Toyohashi University of Technology, in collaboration with Dr. Fumiya Iida, Reader in Robotics at the department of Engineering at the University of Cambridge, has successfully developed a leech-shaped robot, "LEeCH" (Longitudinally Extensible Continuum-robot inspired by Hirudinea), which can climb vertical wall. LEeCH is capable of elongating and bending its body without any constraints; just like a leech. Thanks to its flexible body structure and the suction cups, the robot has successfully climbed a vertical wall and even reached the other side of the wall. The study was published in Soft Robotics, an American scientific journal, on March 27, 2019.
Wall climbing robots have a wide range of potential applications, including building inspections and maintenance, and search and rescue duties at disaster sites. For robots, climbing straight up vertical walls is a fairly easy goal to accomplish. In the real world however, the robot may have to navigate over obstacles on the wall, such as steps, and transition to walls with different facings. Even if it can reach the top, the robot then faces the most challenging task, which is to traverse the summit over to the other side.
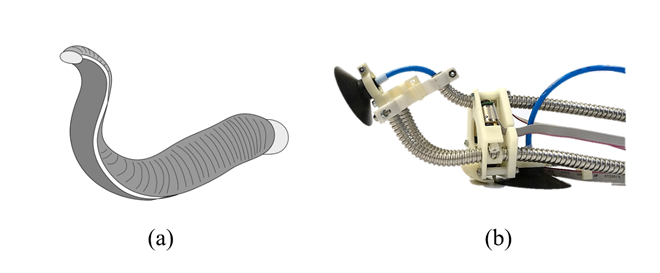
The research team has developed a robot inspired by land leeches, which are excellent climbers in nature. The land leeches, usually found in forests or mountains, can move around complex terrain and walls using two suction cups on each end of their soft extensible bodies. Their bodies are so light and soft that they are relatively shock resistant should they fall from height.
The team designed a new motion mechanism using the tubular structure of a shower hose to mimic the useful qualities of leeches, namely, to be lightweight, flexible and extendable. The flexible tube with a metal plate with an S shaped profile spirally wound is the same kind as found in household use. A gear engages with the helical groove on the surface of the tube. The flexible tube moves back and forth by rotational motion. The robot has a body composed of three flexible tubes that are connected in parallel. The body can bend or elongate by controlling the length of each flexible tube fed by the gear.
The robot successfully achieved upward/downward climbing and horizontal transition on a vertical wall. By combining these two transitions, the robot is capable of moving freely on a two-dimensional wall surface. The robot’s flexible body, with large deformation, enabled it to transition from one side of a vertical wall to the other side. Achieving this level of freedom of movement for a soft and flexible robot represents a world first.
The Ph.D candidate Ayato Kanada, who is in charge of the development and the lead author of the study, says, "I came up with the idea in the bathroom of my house. The shower hose went wild as if it was alive when I inadvertently turned on the faucet at maximum. Then an idea occurred to me that if I could manipulate a hose, I might be able to make a robot which mimics the dynamic movement of a living creature."
Making the most of the hollow structure of the shower hose, the team is considering the possibility of changing the stiffness of the tube by pouring fluid into the cavity. Robots with this kind of flexible body structure are not only highly adaptable to their environment, but also highly secure against collision. As such, they show promise in terms of their potential applications to labor in proximity to humans.
This work was supported by the Grant-in-Aid for JSPS Research Fellow (No. 17J04776), the United Kingdom’s Engineering and Physical Science Research Council (EPSRC) DTP under Award 1476475 and RG92738, and Mathworks Ltd RG90950 378. Ayato Kanada, the first author, was supported by the Program for Leading Graduate Schools conducted by Japan Society for the Promotion of Science of the Ministry of Education, Culture, Sports, Science and Technology.
Reference
Ayato Kanada, Fabio Giardina, Toby Howison, Tomoaki Mashimo, Fumiya Iida, "Reachability Improvement of a Climbing Robot based on Large Deformations induced by Tri-Tube Soft Actuators," Soft Robotics.
https://doi.org/10.1089/soro.2018.0115
ヒルの柔らかい体に学ぶ — 壁登りロボット
壁の手前側から反対側まで180度グルっと回転By 真下 智昭
豊橋技術科学大学機械工学系 真下智昭准教授らとケンブリッジ大学工学部 飯田史也准教授らの研究チームは、垂直な壁を登るヒル型ロボット「LEeCH」を開発しました。LEeCH(Longitudinally Extensible Continuum-robot inspired by Hirudinea)は、シャワーのホースを素材とした柔軟な体と2つの吸盤を持っており、本物のヒルのように自在に伸びたり曲がったりすることが可能です。柔らかい構造と吸盤を活かすことで、垂直な壁を登りさらに壁の反対側まで移動することを可能としました。本研究の結果は、3月27日に米国の科学雑誌Soft Roboticsに掲載されました。
壁登りロボットはビルの点検・検査や災害現場での捜索・救助などでの活躍が期待されています。垂直な壁を真っすぐに登るだけならばそれほど難しくはありません。しかし実際には、壁の途中にある段差や障害物を越える、または、方向の異なる壁へ移動しなければならない場合もあります。特に難しい課題は、壁の反対側に移動することです。ロボットが、壁を垂直に登って頂上に辿り着いたのちその壁を乗り越えるのは、ロボットにとっては至難の業でした。
そこで、研究チームは自然界の優れた登山家である山ヒルを模倣したロボットを開発しました。山に生息する山ヒルは、その両端にある2つの吸盤と伸縮自在な体を用いて、複雑な地形や壁面を自在に移動することが出来ます。また、その柔らく軽い体は、万が一高所から落下しても大きなダメージを負いません。
この軽量・柔軟・伸縮自在といったヒルの特長を模倣するために、シャワーのホースの構造を用いた新しい動作機構を考案しました。このホースはS字形状の金属板が螺旋状に巻かれたもので、一般の家庭でも使用されているものです。ホースの螺旋状の溝に歯車の歯をかみ合わせると、歯車の回転に応じてホースは前後に動きます。開発したロボットは3本のホースを束ねた体を持ち、歯車で送り出したそれぞれのホースの長さに応じて、伸縮または曲げ運動を行うことが出来ます。
開発したロボットは垂直な壁において、昇降方向や水平方向の移動に成功しました。この2つの移動方法を組み合わせることで、ロボットは2次元の壁面上であれば自由な位置に移動することが可能です。さらに柔軟かつ大きく変形する体を活かして、垂直な壁から反対側の壁への移動を達成しました。このように自由な壁面移動ができる柔らかいロボットの開発は、世界初の研究成果です。
開発者であり論文の筆頭著者である博士後期課程の金田礼人は「このアイデアは実は、自宅のお風呂場でひらめきました。シャワーの水を間違えて勢いよく出してしまったところ、ホースが生物のように勢いよく暴れだしました。それを見て私は、ホースを自由に動かすことができたら生物のようにダイナミックな動きを行うロボットが実現できるのではないかと考えました。」
研究チームは、シャワーのホースの中空構造を活かし、内部に液体を流してロボットの硬さを変化させるアイデアも検討しています。柔軟な構造をもつロボットは、環境への適応性が高いだけでなく、衝突に対する安全性も高いことから、将来的には人の近くで働くロボットとしても活躍できる可能性もあります。
Researcher Profile

| Name | Tomoaki Mashimo |
|---|---|
| Affiliation | Department of Mechanical Engineering |
| Title | Associate Professor |
| Fields of Research | Actuator/ Mechatronics/ Robotics/ Ultrasonic |
ここでコンテンツ終わりです。