
ここからコンテンツです。
Job-sharing with nursing robot
Conciliatory approach to human-robot symbiosis through development of “Terapio” medical round support robot By Ryosuke Tasaki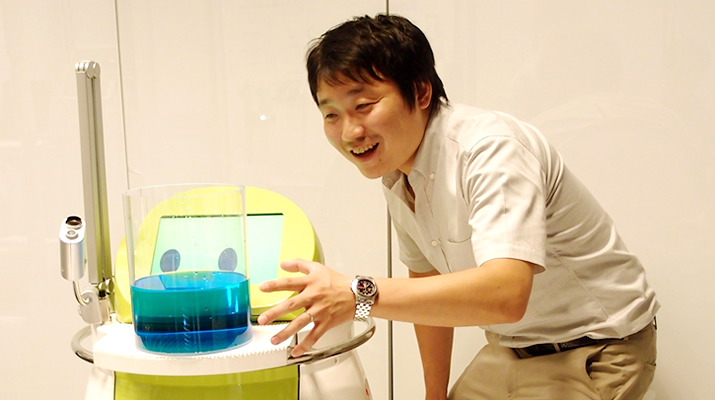
Ryosuke Tasaki and Kazuhiko Terashima have organized a cooperative project team to develop a new robot designed to help Japan cope with medical care in the eventuality of the predicted massive earthquake striking the country. This team consists of engineering researchers, medical doctors, and software/hardware companies in Fukushima and Toyohashi. They set about determining the factors that are most important to hospital patients in modern society, after which they set about developing the world’s first medical round robot capable of job-sharing, making more time for face-to-face nursing care.
Given the aging of the population and the low birthrate both in Japan and elsewhere, healthcare professionals are in short supply and unevenly distributed, giving rise to a need for a method of performing simple tasks that does not rely on humans. Although increasing numbers of medical institutions have introduced electronic medical records, a variety of issues remain unresolved, such as the inconvenience of data recording and the high costs associated with data input.
The use of robots to support medical care data management and the delivery of resources at the medical front—thus allowing humans to concentrate on those tasks requiring knowledge, skill, and experience—is expected to contribute to the enhancement of the quality of healthcare services.

Ryosuke Tasaki, Kazuhiko Terashima and their colleagues have developed “Terapio” a next-generation robot that replaces the conventional medical cart used by healthcare staff during their rounds in a hospital. Terapio assists staff in delivering resources and recording information on their rounds, and is also capable of friendly communication.
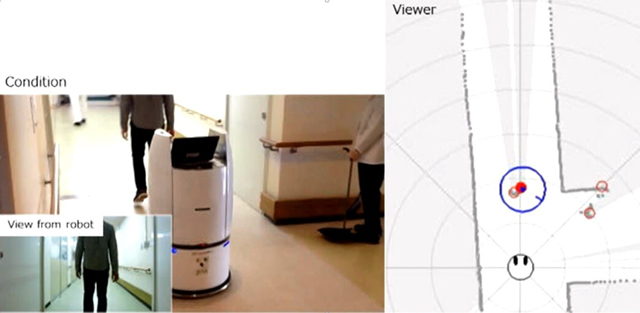
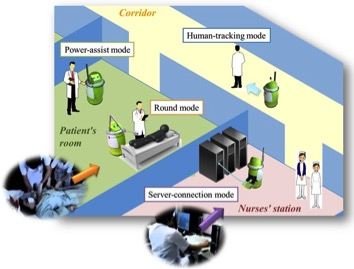
Terapio is an autonomous mobile robot that can track a person. It uses a differential-drive steering system to provide both quiet operation and smooth omnidirectional mobility. It recognizes its environment and autonomously tracks a specified human while avoiding obstacles. Using its ring-shaped power-assist handle, an operator can control the robot accurately by applying a slight force.
Terapio can also record patients’ personal and vital signs data as well as displaying data, such as the patient’s health records. In terms of its exterior design and color scheme, Terapio is suitable for use in medical institutions. The touch panel on the top of Terapio is used for operating the robot and inputting/displaying data from the rounds. It is designed such that the operator and patient can recognize the robot’s status and actions by expressions shown on the display that change according to the robot’s operation mode, which are “power assist,” “tracking,” and “rounds.”
The LCD display on the top of Terapio serves as the robot’s “face.” It changes its expression by changing the shape of its “eyes.” These eyes give Terapio a human-like, friendly, and communicative persona which are a step up from the plain functionality of a hospital cart.
"As we were developing Terapio, we could clearly imagine the human-robot symbiosis. By constantly promoting the pursuit of system integration technology, life with robots can become a reality in the near future,” said assistant professor Ryosuke Tasaki. “An ongoing daily effort to incorporate high-tech robotics into our activities will be the best way to realize life in our future society.”
When medical and nursing care workers are released from menial and back-breaking work by sharing their duties with a robot, they will be able to concentrate more on interacting with their patients and providing knowledgeable, kind, and compassionate care. Terapio can also elicit warmth from the humans with which it interacts. The researchers expect that similar research will become widespread in the future as more people adopt a conciliatory approach to human-robot symbiosis.
Reference
Tasaki, R., Kitazaki, M., Miura, J., and Terashima, K. (2015). Prototype Design of Medical Round Supporting Robot “Terapio”. Proceedings of the IEEE International Conference on Robotics and Automation (ICRA-2015), Paper WeA2T4.3. Presented May 27th 2015 at the Washington State Convention Center in Seattle, Washington, USA.
Researcher Profile

| Name | Ryosuke Tasaki |
|---|---|
| Affiliation | Department of Mechanical Engineering |
| Title | Assistant Professor |
| Fields of Research | Control engineering / Mechanical dynamics / Robotics |
ここでコンテンツ終わりです。