
もくじ
クリックすると各記事の先頭に移動できます
クリックすると各記事の先頭に移動できます

iPS細胞:発見から医療へ/学長 榊佳之(さかき よしゆき)
 | |
| 榊学長 | |
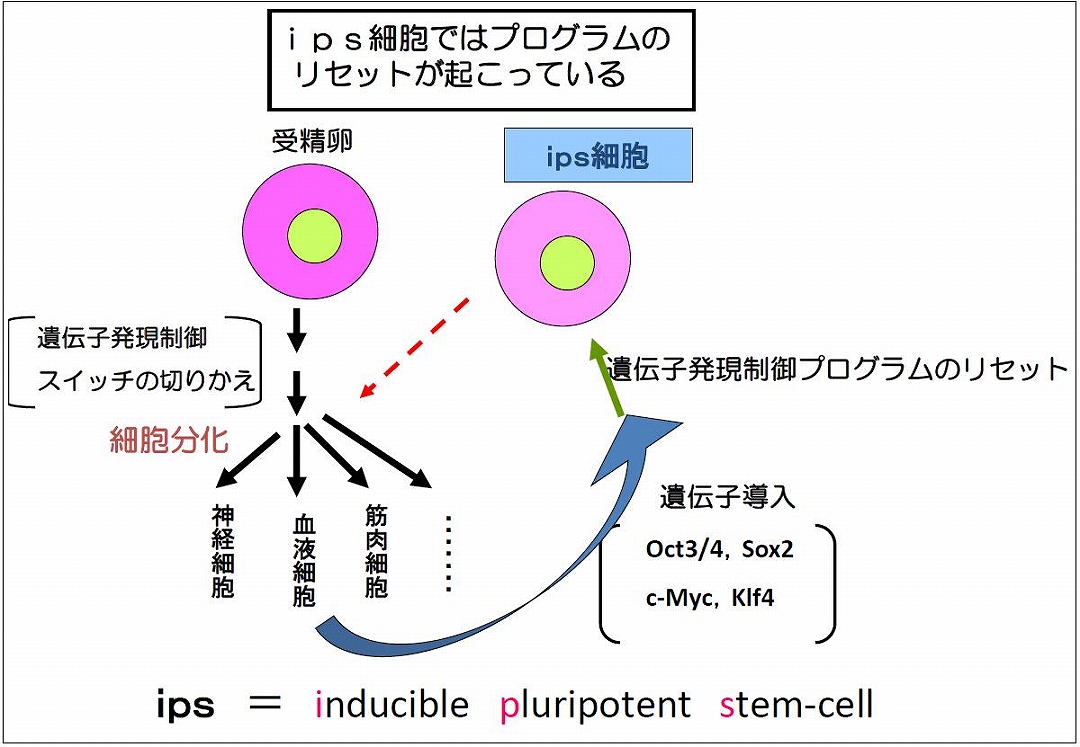 | |
| iPS細胞で起こっているプログラムのリセット |
受精後に始まる体の形成(発生)のごく初期には細胞は心臓、肝臓、神経など、どの組織にもなれる「多分化能」を持っています。しかし、ある段階を過ぎると各々の細胞の特異性が明確となり、それぞれ心臓、肝臓、神経を形成する細胞としての運命付け(コミットメント)が行われます。これは遺伝情報の中の特定のスイッチが働くことで、それぞれに運命付けされた遺伝情報プログラムが動き出すためと考えられ、「逆戻りできない」というのが生物学の常識でした。この常識に疑問を呈したのがガードン博士です。今から50年前の1962年、カエルの受精卵から遺伝情報を持つ核を抜き取り、既に運命付けされていたカエルの皮膚細胞の核と入れ替えたところ、全く正常なカエルが生まれてくることを発見しました。皮膚に運命付けされていた遺伝情報でも元に戻れる「初期化」が可能なことを発見しました。しかしこの発見は長らくカエルの卵での特殊な事象ではないかとも言われてきました。この「初期化」がたった4つの遺伝子を使ってマウスやヒトの細胞でも可能なことを示したのが山中教授の発見です。今回のノーベル賞はこの遺伝情報の「初期化」と言う、生物学の「常識」を覆す発見に対して授与されました。
メディアはじめ社会では山中教授がiPS細胞と名付けた初期化された「多分化能細胞」を使うことでの「再生医療」への期待が大きく膨らんでいますが、医療応用という点ではまだ多くの課題が残っています。山中教授は受賞後も自らの目標、即ち医療への応用へはまだ途半ばであることを繰り返し述べています。工学でも新しい発見や技術開発が実用化されるまでには、多くの課題を乗り越えなければならないのと同じです。最大の課題は細胞のがん化のリスクです。iPS細胞形成に使われる4つの遺伝子のうちcMycと呼ばれるものは元々がん遺伝子として発見され、がん化を引き起こすリスクがあります。これにはcMycの代替遺伝子を使う方法なども開発されていますが、初期化効率、増殖速度などに課題が残るようです。また4つの遺伝子を細胞に導入するために使われる「運び屋DNA」もゲノムを傷つけるリスクがあります。本学の水野教授のところで行われている、電気的な手法でDNAを注入する技術は改善に役立つかもしれません。もう一つの課題はiPS細胞を目指す特定のタイプの細胞に運命付ける確かな方法が見つかっていないことです。たくさんの試行の中から良いものを見つけ出す「運に任せる」やり方は研究段階では良くても医療応用となると問題です。目指すタイプの細胞に効率よく誘導させる適切な誘導物質の発見が求められます。また、誘導されたiPS細胞の中から目的に沿ったものを見つけ出す検出技術も求められています。細胞をすり潰すわけにはいきません。生きたままで、しかも1細胞もしくはごく少量の細胞が対象です。本学で開発されつつある微細な細胞操作技術、高感度センサ技術などは応用できるかもしれません。iPS細胞を生きたままでモニタリングする技術は多数の化合物の効果をスクリーニングしなくてはならない薬の開発にも大きな力となるでしょう。
この他にもiPS細胞の「実用化」にはまだいくつかの課題があるのも事実です。その解決には医学・生物学だけでなく多くの学問分野、特に工学的手法や技術の応用が不可欠と思います。本学の先生方も、学生の皆さんもiPS細胞、更には医学・生物学の進歩にも関心を持ってこれからを進んでほしいと思います。

「センサの医工連携への展開」/電気・電子情報工学系 教授 澤田和明(さわだ かずあき)
半導体・LSIは、パソコン・家電等の電子機器だけではなく、自動車・ロボットなど多くの分野に用いられ、安全で快適な私たちの暮らしを支えています。この半導体を作る技術を利用して、いろいろなミクロンサイズのセンサが製作され、私たちの気がつかないところで活躍しています(たとえば、スマートフォンの傾きを検知する加速度センサ、人の気配を感じて照明などを制御する人感センサ)。自動車などのために開発されてきたミクロンサイズのセンサ技術をもとに、私たちの健康管理や病気の早期診断のための新たな研究・開発が始まっています。健やかで充実した人生を送ることは私たち万人の願いであり、そのための新たな医療用センサの開発が望まれています。これらのセンサの助けを借りて、自宅で健康な生活を送ることができれば、私たちのQOL(生活の質)を高めるだけでなく、現在社会問題になっている医療費の削減にもつながることが期待できます。
エレクトロニクス先端融合研究所(EIIRIS)と本学のLSI工場(ベンチャー・ビジネス・ラボラトリー)では、開学以来開発してきたセンサ技術を基盤として、バイオ・医療分野に向けた新たなセンサの開発を進めています。これまでのセンサは工学系研究者のみで開発が行われてきましたが、医療用途のセンサ開発のためには医学系研究者との連携が不可欠です。エレクトロニクス先端融合研究所には多くのバイオ・生物・医学系の研究者と工学系センサ研究者が一堂に会し議論する場があり、世界に類を見ないセンサを実現する最適な研究・開発の環境が整っているといえます。
EIIRISとLSI工場で進めている医工連携研究の一例として「イオンイメージセンサ」を紹介します。一般的なイメージセンサは、光強度の分布を取得するものですが、「イオンイメージセンサ」は、イオンの分布を動画で見ることが可能です。これまで世の中には、イオンの動きを動画で表示できるセンサは存在せず、たいへんユニークなセンサを開発することができました。異なる水素イオン濃度の液体が混ざっていく過程を動画像で撮影したスナップショットを右に示します。このユニークなセンサを、 EIIRISや外部機関の医学系研究者と連携しながら医療用途に向けて研究を進めています。これまで、医学分野、バイオ・生化学分野の研究者・技術者は、光学顕微鏡を使って“光”の情報をもとに様々な現象を見出してきました。この「イオンイメージセンサ」は、生体本来の活動を司る“イオン”を直接観察することができ、今まで誰もが見ることができなかった細胞の代謝活動等など観察できる可能性を持っています。この「イオンイメージセンサ」を用いて、 EIIRISの研究者が、新たな顕微鏡システムの開発を行ったり、国立長寿医療研究センター(愛知県大府市)ではアルツハイマー病の超早期診断に向けた検査装置の開発を進めています。
医学系研究者にとって、新たな原理を持つセンサの出現はこれまで捉えることができなかった現象を見出す機会を、工学系研究者にとって、医学系研究者との連携はセンサの実用化を進める機会をもたらします。本学で発明された「イオンイメージセンサ」の医療分野への展開が進んでいることは、医学と工学の研究者が常にコミュニケーションを取りながら連携できる場所と時間を与えられたことが大きかったと確信します。この開発を通して医工連携成功の鍵は、少しずつ互いの専門分野に入り込んで、忌憚ない(ずうずうしい)真摯な議論と、手を動かす(おせっかいな)連携を行っていくことが重要だと感じています。
エレクトロニクス先端融合研究所(EIIRIS)と本学のLSI工場(ベンチャー・ビジネス・ラボラトリー)では、開学以来開発してきたセンサ技術を基盤として、バイオ・医療分野に向けた新たなセンサの開発を進めています。これまでのセンサは工学系研究者のみで開発が行われてきましたが、医療用途のセンサ開発のためには医学系研究者との連携が不可欠です。エレクトロニクス先端融合研究所には多くのバイオ・生物・医学系の研究者と工学系センサ研究者が一堂に会し議論する場があり、世界に類を見ないセンサを実現する最適な研究・開発の環境が整っているといえます。
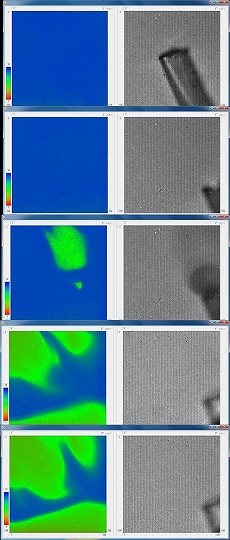 | |
| イオンイメージセンサで撮影 | |
医学系研究者にとって、新たな原理を持つセンサの出現はこれまで捉えることができなかった現象を見出す機会を、工学系研究者にとって、医学系研究者との連携はセンサの実用化を進める機会をもたらします。本学で発明された「イオンイメージセンサ」の医療分野への展開が進んでいることは、医学と工学の研究者が常にコミュニケーションを取りながら連携できる場所と時間を与えられたことが大きかったと確信します。この開発を通して医工連携成功の鍵は、少しずつ互いの専門分野に入り込んで、忌憚ない(ずうずうしい)真摯な議論と、手を動かす(おせっかいな)連携を行っていくことが重要だと感じています。
医工連携による介護福祉ロボットや病院内サービス支援の研究開発/人間・ロボット共生リサーチセンター長 寺嶋一彦(てらしま かずひこ)
 | |
| 人間・ロボット共生リサーチセンター 「スマート介護ステーション」の開発状況 | |
| 全方向移動パワーアシスト介護ベッド (医療法人さわらび会−福祉村病院と共同開発) | |
| 病院内回診ロボット (福島県立医科大学と共同開発中) | |
医療・福祉分野の研究においては、現場は病院や医科側にあり、工学側としては医工連携は不可欠です。ニーズとシーズを提供し合い、イノベーションが生まれます。医工連携により、本学の研究者や学生も現場を理解し、また使命感を持つことができます。
ノーベル賞を受賞された京都大学山中伸弥教授によるiPS細胞の研究をはじめ、医療関係者は、「人の命を救い、人を助ける」素晴らしい使命を持った仕事をなされています。一方、我々「エンジニアの使命」は何でしょうか?命に限りがある人間が、楽しく、生き生きと暮らせるために、「数々の文明の利器」が生み出され、我々はその恩恵を受けて生きています。「それらの多くを生み出してきた」のが技術者・研究者であることを考えると、エンジニアは素晴らしい使命をもった仕事です。心を引き締め、夢を抱き、人間・ロボットリサーチセンターの教職員が一丸となり頑張っていきます。